


I had posted about a month ago about wanting to try a Person-Sensor: Has Anyone Used a Person Sensor from UsefulSensors? I had a couple on backorder from SparkFun and I just received them yesterday. I've started to notice that there has been improvement in availability of development boards and sensors (or maybe just stuff I use). I just ordered another Pi Pico W and Xiao RP2040 at their normal prices.
UsefulSensors has documentation on github: Person_Sensor_Docs .
I've decided to try using the Person-Sensor with a Wio Terminal using CircuitPython. I documented my setup in this post: CircuitPython on Wio Terminal.
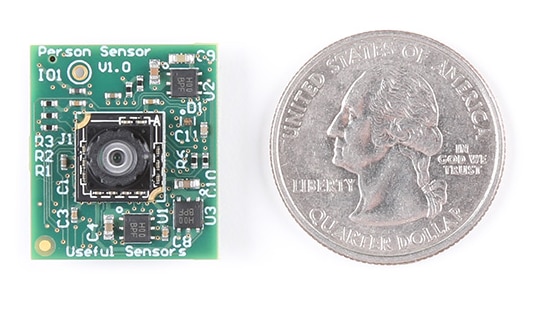
Here are some pics of the Person-Sensor:
Image sensor on the frontside.
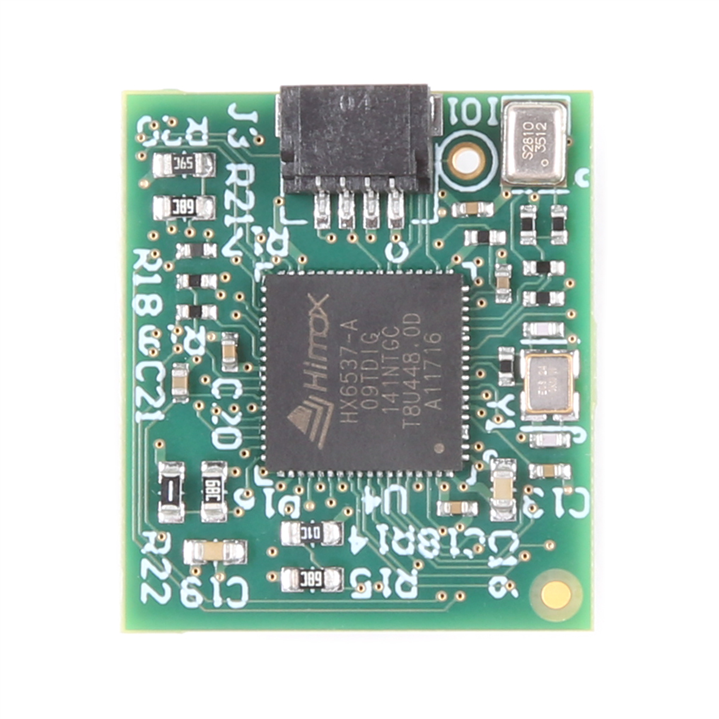
The backside has the Himax HX6537-A processor and a QWIIC connector.
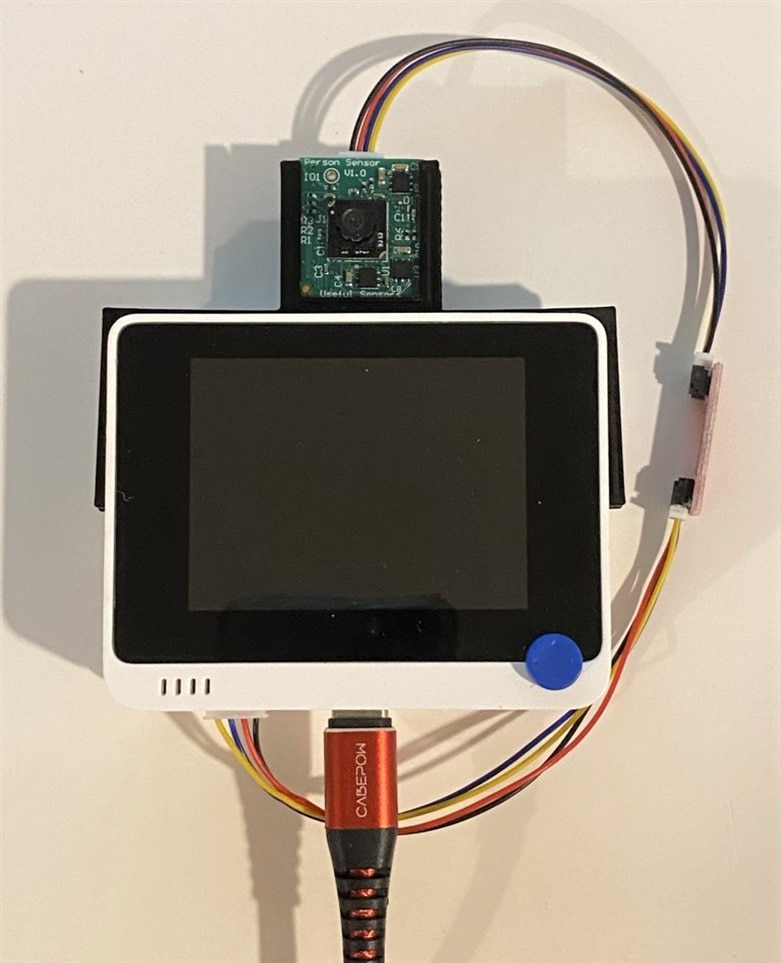
I decided to 3D print a clip to mount the sensor on the Wio Terminal. The sensor can mount with the camera facing in the same direction as the LCD screen (selfie mode) or with the camera facing away (camera mode). The only interface to the sensor is a QWIIC connector and the Wio Terminal has Grove interfaces (pin but not size compatible). It turns out that I only have QWIIC to GROVE adapter cables in 100mm length which is too short for the way I wanted to mount the sensor. I used a QWIIC cable and QWIIC breakout board to extend the adapter cable as you can see in the pic. I can now use this setup on a tripod using a cellphone mount or on a metal surface using the magnets on the back of the Wio Terminal.
I am going to run the CircuitPython face detection code: https://github.com/usefulsensors/person_sensor_circuit_python. This code will also run on a Pi Pico - you can see in the code that it has to use a different I2C setup.
person_sensor_face_detection.py
# Example of accessing the Person Sensor from Useful Sensors on a Pico using
# CircuitPython. See https://usfl.ink/ps_dev for the full developer guide.
import bitmaptools
import board
import busio
import digitalio
import displayio
import struct
import time
# The person sensor has the I2C ID of hex 62, or decimal 98.
PERSON_SENSOR_I2C_ADDRESS = 0x62
# We will be reading raw bytes over I2C, and we'll need to decode them into
# data structures. These strings define the format used for the decoding, and
# are derived from the layouts defined in the developer guide.
PERSON_SENSOR_I2C_HEADER_FORMAT = "BBH"
PERSON_SENSOR_I2C_HEADER_BYTE_COUNT = struct.calcsize(
PERSON_SENSOR_I2C_HEADER_FORMAT)
PERSON_SENSOR_FACE_FORMAT = "BBBBBBbB"
PERSON_SENSOR_FACE_BYTE_COUNT = struct.calcsize(PERSON_SENSOR_FACE_FORMAT)
PERSON_SENSOR_FACE_MAX = 4
PERSON_SENSOR_RESULT_FORMAT = PERSON_SENSOR_I2C_HEADER_FORMAT + \
"B" + PERSON_SENSOR_FACE_FORMAT * PERSON_SENSOR_FACE_MAX + "H"
PERSON_SENSOR_RESULT_BYTE_COUNT = struct.calcsize(PERSON_SENSOR_RESULT_FORMAT)
# How long to pause between sensor polls.
PERSON_SENSOR_DELAY = 0.2
# The Pico doesn't support board.I2C(), so check before calling it. If it isn't
# present then we assume we're on a Pico and call an explicit function.
try:
i2c = board.I2C()
except:
i2c = busio.I2C(scl=board.GP5, sda=board.GP4)
# Wait until we can access the bus.
while not i2c.try_lock():
pass
# For debugging purposes print out the peripheral addresses on the I2C bus.
# 98 (0x62 in hex) is the address of our person sensor, and should be
# present in the list. Uncomment the following three lines if you want to see
# what I2C addresses are found.
# while True:
# print(i2c.scan())
# time.sleep(PERSON_SENSOR_DELAY)
# Set up the builtin display if there's one available
try:
display = board.DISPLAY
except:
display = None
if display:
bitmap = displayio.Bitmap(display.width, display.height, 2)
palette = displayio.Palette(2)
palette[0] = 0x000000
palette[1] = 0xffffff
tile_grid = displayio.TileGrid(bitmap, pixel_shader=palette)
group = displayio.Group()
group.append(tile_grid)
display.show(group)
# Keep looping and reading the person sensor results.
while True:
read_data = bytearray(PERSON_SENSOR_RESULT_BYTE_COUNT)
i2c.readfrom_into(PERSON_SENSOR_I2C_ADDRESS, read_data)
offset = 0
(pad1, pad2, payload_bytes) = struct.unpack_from(
PERSON_SENSOR_I2C_HEADER_FORMAT, read_data, offset)
offset = offset + PERSON_SENSOR_I2C_HEADER_BYTE_COUNT
(num_faces) = struct.unpack_from("B", read_data, offset)
num_faces = int(num_faces[0])
offset = offset + 1
faces = []
for i in range(num_faces):
(box_confidence, box_left, box_top, box_right, box_bottom, id_confidence, id,
is_facing) = struct.unpack_from(PERSON_SENSOR_FACE_FORMAT, read_data, offset)
offset = offset + PERSON_SENSOR_FACE_BYTE_COUNT
face = {
"box_confidence": box_confidence,
"box_left": box_left,
"box_top": box_top,
"box_right": box_right,
"box_bottom": box_bottom,
"id_confidence": id_confidence,
"id": id,
"is_facing": is_facing,
}
faces.append(face)
checksum = struct.unpack_from("H", read_data, offset)
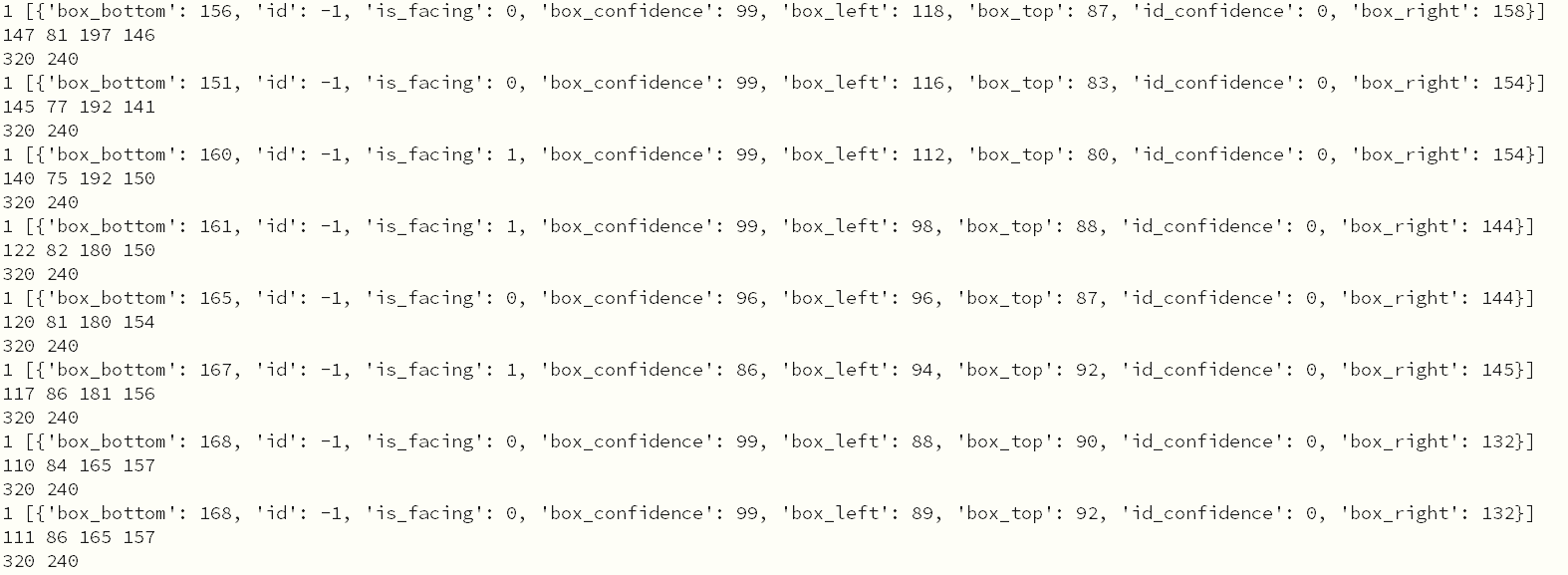
print(num_faces, faces)
# If the board has a display, draw rectangles for the face boxes, and a
# diagonal cross if the person is facing the sensor.
if display:
bitmaptools.fill_region(bitmap, 0, 0, display.width, display.height, 0)
for face in faces:
box_left = face["box_left"]
box_top = face["box_top"]
box_right = face["box_right"]
box_bottom = face["box_bottom"]
x0 = int((box_left * display.width) / 256)
y0 = int((box_top * display.height) / 256)
x1 = int((box_right * display.width) / 256)
y1 = int((box_bottom * display.height) / 256)
print(x0, y0, x1, y1)
print(display.width, display.height)
bitmaptools.draw_line(bitmap, x0, y0, x1, y0, 1)
bitmaptools.draw_line(bitmap, x1, y0, x1, y1, 1)
bitmaptools.draw_line(bitmap, x1, y1, x0, y1, 1)
bitmaptools.draw_line(bitmap, x0, y1, x0, y0, 1)
if face["is_facing"]:
bitmaptools.draw_line(bitmap, x0, y0, x1, y1, 1)
bitmaptools.draw_line(bitmap, x1, y0, x0, y1, 1)
time.sleep(PERSON_SENSOR_DELAY)
The sensor is designed to operate standalone, so face detection is always running. You can see in the test video that the green LED will turn on whenever a face is detected. The CircuitPython program is reading the detection info on the I2C bus and prints to the Serial monitor and also displays bounding boxes on the Wio Terminal screen to show the location(s) of the detected face(s). If the face is facing the camera the program will draw an X in the bounding box.
The hardest part of documenting this stuff is trying to capture video of the device screen, so I apologize for the poor quality.
You can see from the reflection in the Wio Terminal screen my face when it is detected and how the bounding box moves and changes size with my location and proximity (horizontal movement is reversed in selfie mode). You can also see the "X" disappear when I turn my head.
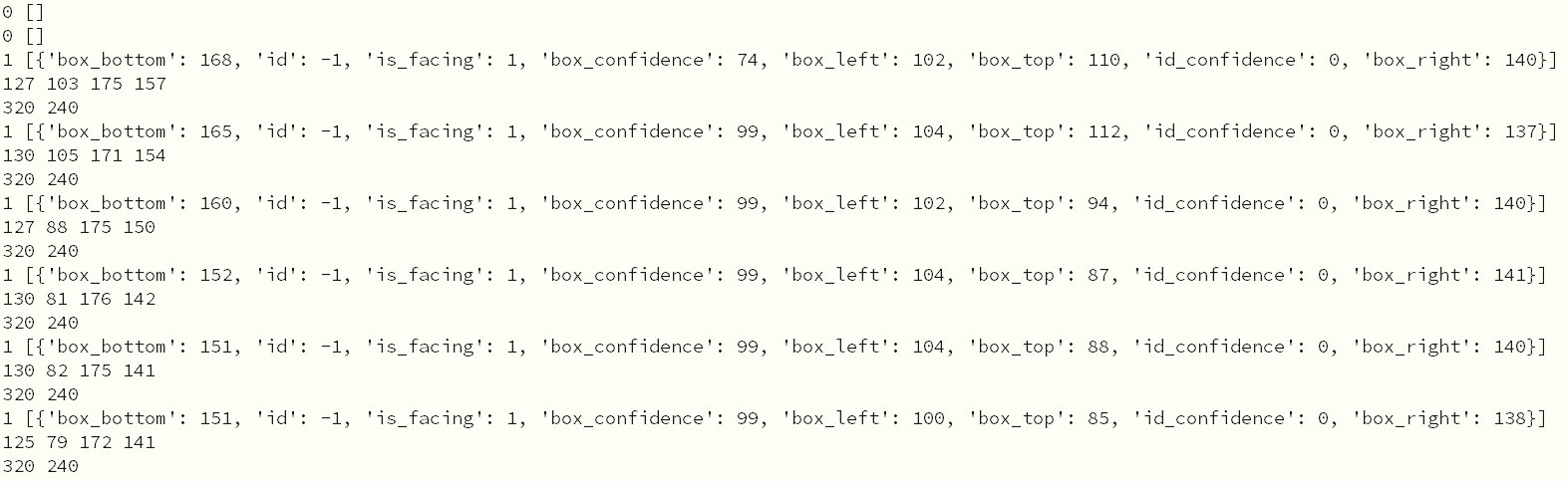
Here are a couple of captures of data from the Mu Serial Window. 0 [] indicates that a face was not detected.
Top Comments