


Introduction
This blog post provides details on how to build and execute the new 2021.2 design for the Ultra96-V2 development board with Dual-Camera Mezzanine.
Design Overview
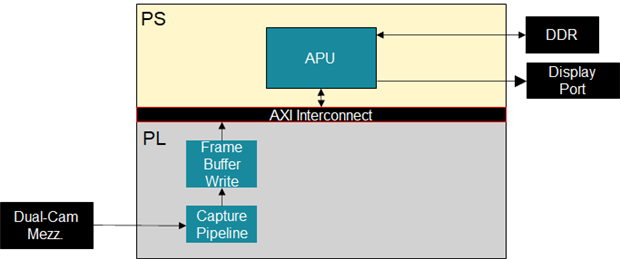
The following block diagram illustrates the 2021.2 version of the hardware design.
The following images capture the resource utilization of the design.


When compared to the previous version of the design 2020.1, the following changes have been made:
- removed the OSD core, including the entire live DisplayPort (DP) sub-system, which was determined to not be required
- modified the capture pipeline
- added a VPSS core for color space conversion
- added BGR format support to the frame buffer write core
- added of the AXI interrupt logic for use with Vitis
When compared to the previous version of the design 2020.2 (https://avnet.me/u96v2-dualcam-2020.2), the following changes have been made:
- update ap1302 drivers
- add controls for brightness, contrast, saturation, gamma, exposure, gain
- add controls for auto-focus, horizontal/vertical flip, 3d_path
- update launch scripts
Supported Sensor Modules
The following sensor modules are supported by the linux-based 2020.2 design:
- AR0144 IAS Sensor Module
- part number : CAV10-000A
- datasheet : http://avnet.me/ias-ar0144-datasheet
- features :
- 1 Mpixel monochrome sensor
- global shutter
- AR1335 IAS Sensor Module
- part number : CAVBA-000A
- datasheet : http://avnet.me/ias-ar1335-datasheet
- features :
- 13 Mpixel (4K) color sensor
- rolling shutter
- auto-focus
Although the Dual Camera Mezzanine comes with two (2) AR0144 IAS sensor modules, it also supports a single AR1335 sensor module.
Capture Pipeline Overview
The linux-based 2021.2 design supports a statically configurable capture pipeline for the following three configurations:
- Dual AR0144 Sensors
- Single AR0144 Sensor
- Single AR1335 Sensor
The dual-camera mezzanine makes use of MIPI in order to connect the image cameras to the processing board.
The hardware design implemented in the programmable logic (PL) includes the following components:
- MIPI CSI-2 RX receiver IP core
- Image Pipeline : implemented with Color-Space-Conversion, and Scaler
- Frame Buffer Write : the DMA engine implementing writes to external DDR
Dual AR0144 Camera Pipeline
The following image illustrates the capture pipeline for the Dual AR0144 configuration.

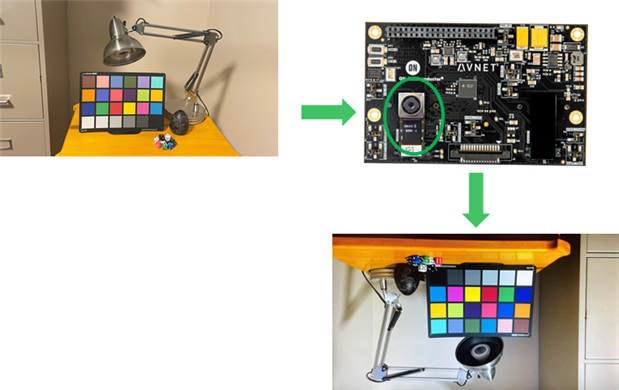
It is important to known that the AP1302 ISP receives the stereo images and generates a single side-by-side-image, as shown below:

Although the side-by-side image reflects the frontal view of the dual camera mezzanine, it is important to know that it contains:
- image from left (L) camera (SENSOR2) on right side
- image from right (R) camera (SENSOR1) on left side
This clarification is essential for any stereo processing that is attempted.
When in doubt, or to convince yourself, place your finger in front of one of the cameras and notice which side of the side-by-side image is blocked.
Single AR0144 Camera Pipeline
The following image illustrates the capture pipeline for the Single AR0144 configuration.

It is important to known that the single AR0144 configuration expects the sensor to be populated on the sensor1 header, as shown below:

Single AR1335 Camera Pipeline
The following image illustrates the capture pipeline for the Single AR1335 configuration.

It is important to known that the single AR1335 configuration expects the sensor to be populated on the sensor1 header, as shown below:
Rebuilding the Design
This section describes how to re-build the linux-based 2021.2 design.
This can be done on a linux machine, which has the Vitis 2021.2 and Petalinux 2021.2 tools correctly installed.
The following commands will clone the Avnet “bdf”, “hdl”, and “petalinux” repositories, all needed to re-build the linux-based design.
$ git clone https://github.com/Avnet/bdf
$ git clone –b 2021.2 https://github.com/Avnet/hdl
$ git clone –b 2021.2 https://github.com/Avnet/petalinux
To rebuild the linux-based design, use the following commands:
$ cd petalinux$ ./scripts/make_u96v2_sbc_dualcam.sh
This will launch the build for the hardware design and petalinux project. The build artifacts that are of interest are the following:
petalinux/projects/u96v2_sbc_dualcam_2021_2/images/linux/BOOT.BIN
petalinux/projects/u96v2_sbc_dualcam_2021_2/images/linux/boot.scr
petalinux/projects/u96v2_sbc_dualcam_2021_2/images/linux/image.ub
petalinux/projects/u96v2_sbc_dualcam_2021_2/images/linux/rootfs.tar.gz
By default, the device tree will be built for the dual AR0144 configuration. If you want to use a different configuration, edit the following file:
petalinux/projects/u96v2_sbc_dualcam_2021_2/project-spec/meta-on-semiconductor/recipes-bsp/device-tree/files/system.dtsi
Un-comment only one of the following lines corresponding to your desired confiuration, then re-build the petalinux project.
#define CONFIG_STATUS_AR0144_DUAL
//#define CONFIG_STATUS_AR0144_SINGLE
//#define CONFIG_STATUS_AR1335_SINGLE
These binaries can be programmed to a dual partition micro SD card, as follows:
- BOOT partition (FAT format)
- BOOT.BIN
- boot.scr
- image.ub
- ROOTFS partition (EXT4 format)
- contents of rootfs.tar.gz, extracted as root
Executing the Design with the Dual AR0144 configuration
After booting the board with the SD card, ensure that the /etc/init.d/load_default_camera_config script is specifying the following configuration
DAEMON=/usr/bin/load_camera_config
DAEMON_OPTS="ar0144_dual"
If this is not the case, edit the configuration, then reboot the design.
The X-windows desktop needs to be stopped in order to run the passthrough example, which is achieved with the following command:
$ /etc/init.d/xserver-nodm stopThe dual camera passthrough can be launched with the following command:
$ source run_1920_1080This script will perform the following steps:
- configure capture pipeline configuration using media-ctl utility
- configure monitor resolution using modetest utility
- launch gstreamer pipeline using gst-launch-1.0 utility
The following test pattern will be visible for ~1 sec (after execution of modetest).

Once the gstreamer pipeline is launched, the following side-by-side image will be visible on the monitor. Notice that the width is compressed by a factor of 2, which is only to make the dual images fit on the monitor.
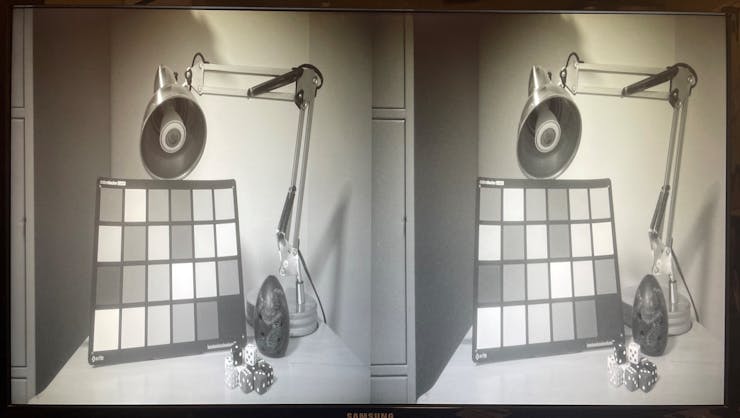
The lens for each AR0144 can be manually rotated to adjust the focus, if required.
Side-by-Side configuration
As previously mentioned, the default side-by-side configuration defaults to the following:
- image from left (L) camera (SENSOR2) on right side
- image from right (R) camera (SENSOR1) on left side
This configuration can be queried with the following command:
$ v4l2-ctl --get-ctrl 3d_path -d /dev/video0
3d_path: 0
This configuration can be changed by writing "1" to the "3d_path" control, as follows:
$ v4l2-ctl --set-ctrl 3d_path=1 -d /dev/video0
This will change the side-by-side configuration to the following:
- image from left (L) camera (SENSOR2) on left side
- image from right (R) camera (SENSOR1) on right side
Executing the Design with the Single AR1335 configuration
After booting the board with the SD card, ensure that the /etc/init.d/load_default_camera_config script is specifying the following configuration
DAEMON=/usr/bin/load_camera_config
DAEMON_OPTS="ar1335_single"
If this is not the case, edit the configuration, then reboot the design.
The X-windows desktop needs to be stopped in order to run the passthrough example, which is achieved with the following command:
$ /etc/init.d/xserver-nodm stop
In order to display the full resolution of the AR1335 sensor (3840x2160), the QoS configuration needs to be optimized for the DisplayPort (DP) monitor.
Otherwise, the DP controller will starve for bandwidth to external memory, and the image will contain glitches.
This is accomplished with the following command:
$ optimize_qos_for_dp
The 4K camera passthrough can be launched with the following command:
$ source run_3840_2160
This script will perform the following steps:
- configure capture pipeline configuration using media-ctl utility
- configure monitor resolution using modetest utility
- launch gstreamer pipeline using gst-launch-1.0 utility
The following test pattern will be visible for ~1 sec (after execution of modetest).

Once the gstreamer pipeline is launched, the following image will be visible on the monitor.

Auto-Focus
There is no need to manually turn the lens for the AR1335 sensor module, since it implements Auto-Focus functionality.
The CAVBA-000A datasheet indicates the auto-focus is implemented with the following components:
- Lens Type : Largan 50013A7
- VCM Type : Jahwa QJ4C
- VCM Driver : DW9790A

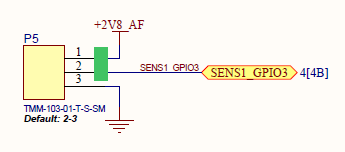
In order to power the VCM device, the following jumper setting needs to be placed in the 1-2 position on the dual camera mezzanine.
The Voice Coil Motor (VCM) is under control of the on-board AP1302 ISP device.
Although the AP1302 firmware has Auto-Focus "off" by default, it can be enabled by the user.
This configuration can be queried with the following command:
$ v4l2-ctl --get-ctrl auto_focus-d /dev/video0auto_focus: 0
This configuration can be changed by writing "1" to the "auto_focus" control, as follows:
$ v4l2-ctl --set-ctrl auto_focus=1 -d /dev/video0
Where to Buy the Hardware
The following links describe the hardware requirements needed to run this design.
Ultra96-V2
or Ultra96-V2 I-grade
Ultra96-V2 4A Power Supply
Buy Ultra96-V2 4A Power Supply
Ultra96-V2 JTAG/UART Adapter
Buy Ultra96-V2 JTAG/UART Adapter
96Boards onsemi Dual Camera Mezzanine
Buy 96Boards onsemi Dual Camera Mezzanine
Going Further
A Vitis-AI 2.0 design has been built on top of this 2021.2 design, and is documented as a hackster.io project.
http://avnet.me/vitis-ai-2.0-dualcam
{kind=link}

This hackster.io project includes the following additional content:
- instructions for building Vitis platform and Vitis-AI design
- pre-built SD card image for Vitis-AI enabled design
- python scripts for stereo processing (anaglyph, stereo neural inference)
Conclusion
I hope this tutorial will help you get started quickly with the Ultra96-V2 and Dual-Camera Mezzanine, and inspire you to create innovative stereo applications.
If there is any other related content that you would like to see, please share your thoughts in the comments below.
Revision History
| Date | Description |
|---|---|
| 2022/02/07 | Initial Version. |
-

nitsvnit
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

nitsvnit
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children