|
For the Sound and Vibration Measurement Hat for Raspberry Pi road test, I'm reviewing Measurement Computing's IEPE Measurement DAQ HAT for Raspberry Pi. |
The test device is now built (see this post with fellow e14 member balearicdynamics in action). 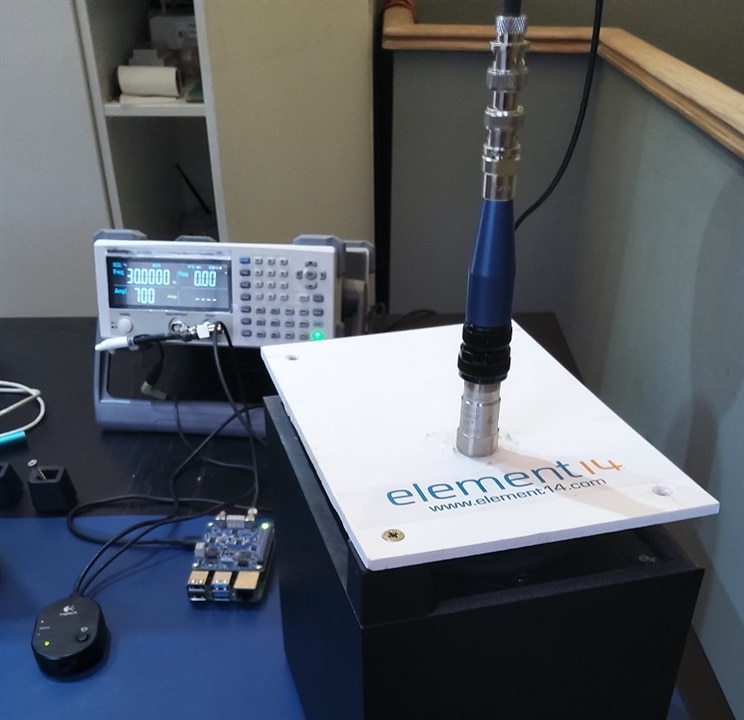
I've done two sweeps. Both started at 20 Hz. First one to 100 Hz. Second one to 200 Hz. Each time with an increment of 2 Hz.
Input to the vibration table was 200 mVPP.
Each mV is represents a gram detected by the accelerometer. 51200 samples / s. RMS calculated at every increment based on 32786 samples.
The test LabVIEW flow I developed for the jig was used.

20 - 100 Hz: The low side drop-off is caused by the audio filter in the subwoofer that I used as vibration motor. There's a resonance at 55 Hz.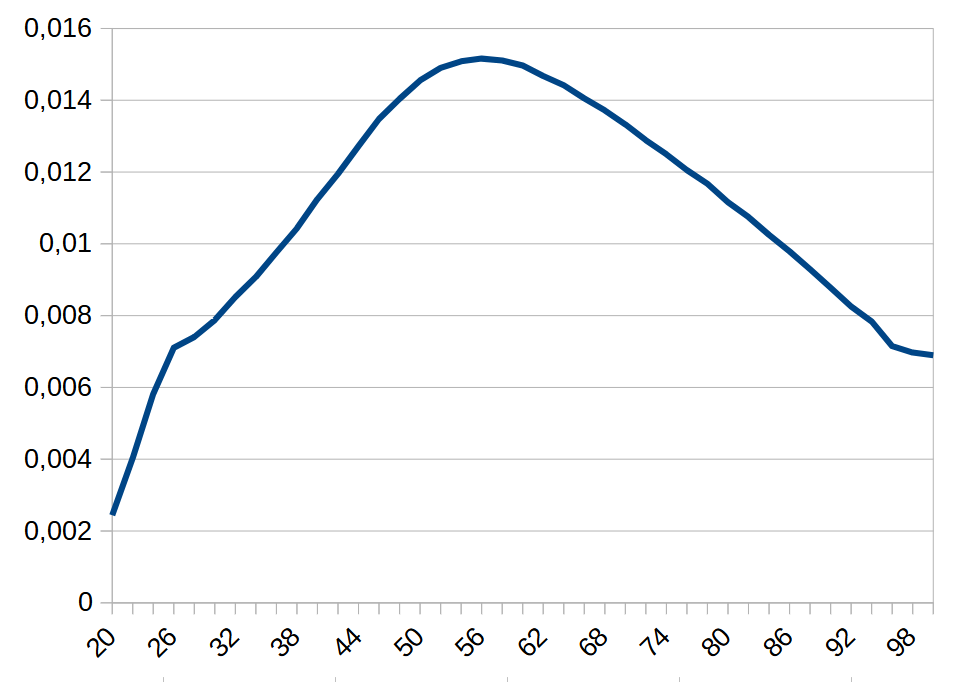
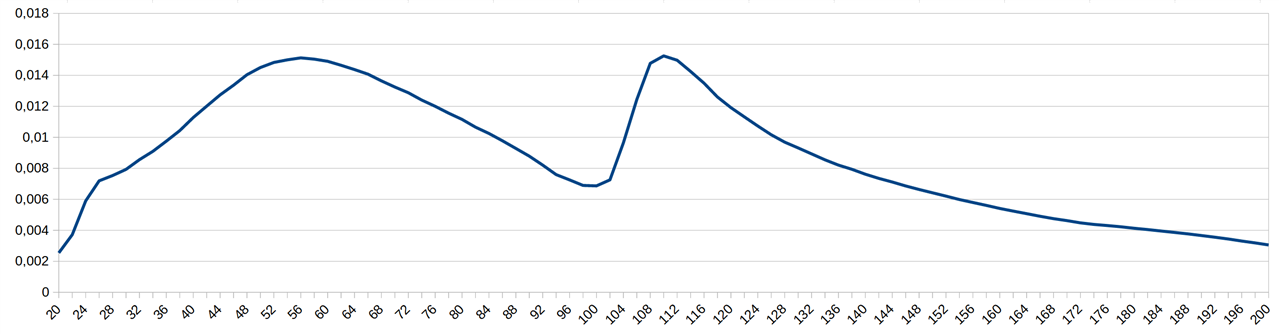
now extended from 20 Hz to 200 Hz: the same image shows before the 100 Hz. That's good - it shows that the behaviour is repeatable. There's a second resonance at +- 110 (harmonic?).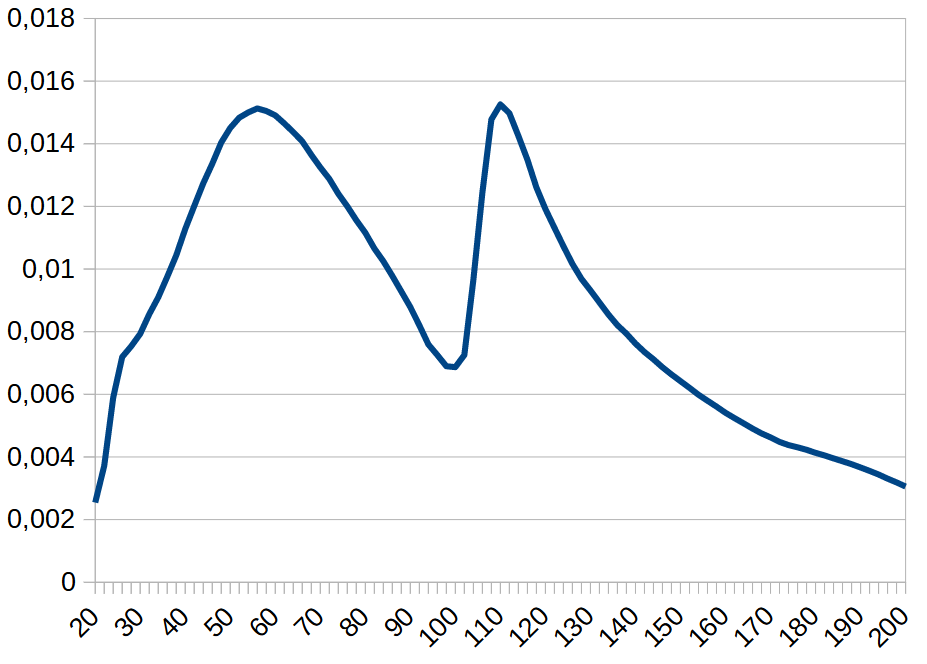
I wonder if I can compensate the peaks and valleys away using calculations. I don't necessary have to do that in the software.
I can run one sweep without the payload mounted as a reference and store that to a spreadsheet.
Then run a second sweep with the device-under-test mounted, save that to a spreadsheet. And use Excel / Calc to deal with the compensation?
I'll give it a try.
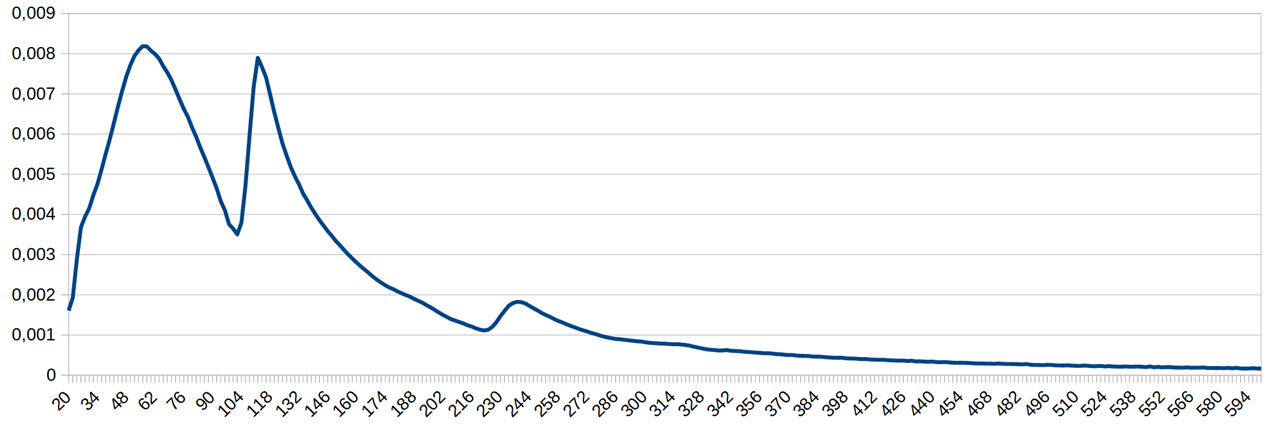
out of curiousity, I ran a wider sweep from 20 Hz to 600 Hz. This time the input signal was 100 mVPP.