


Blog 4: Interfacing with OV7670 Camera
Now that we have the driver for the SD card where the images will be stored to, it is now time for the main event. The goal of this fourth blog is to to be able to interface with the OV7670 camera.
OV7670 is the most widely used camera module by electronics hobbyists. It is super cheap and small. If you are not looking for a high resolution camera, this module fits the bill.It has a resolution of 640x480 and running @30fps which is just enough for our mini camera security project.The OV7670 camera I bought has 18 pins.

How to Interface with OV7670 Camera
With 18 pins, the camera module might look daunting. But if you have a clear idea on what each of these pins do, it will easier for a beginner to interface to it. Let us take this slowly, let us first focus on how the host (the FPGA) can talk to the camera. The OV7670 is controlled using Serial Camera Control Bus (SCCB) which is just an I2C interface and the corresponding pins for that are the SIOC(Serial Clock) and SIOD(Serial Data) pins.
Now lets see, we already have an SPI driver(for SD card driver) but do we have an I2C driver?
I2C Driver
I2C is as simple as SPI, image below best shows how it works. It only needs two wires, unlike in SPI, since in I2C the Master and the Slave shares a common data pin. Messages are broken up into packets. Each message has an address frame that contains the binary address of the slave, and one or more data frames that contain the data to be transmitted. The message also includes start and stop conditions, read/write bits, and ACK/NACK bits between each data frame. That might look a lot but those are just simple handshakings between Master and Slave.
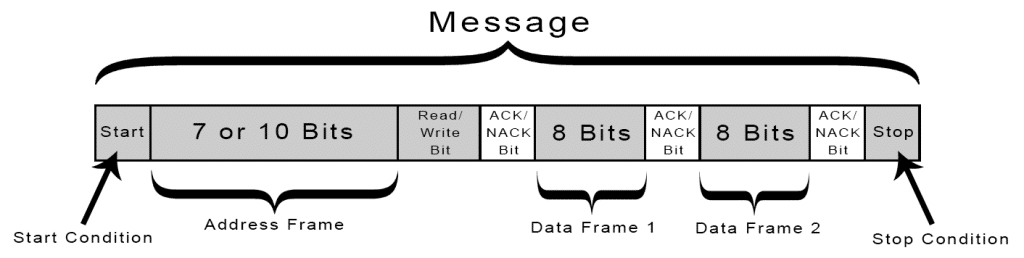
To explain it very briefly, START condition is when SDA becomes low while SCL is high. STOP condition is when SDA becomes high while SCL is high. Write bit is 0(Master will send data) while read bit is one(Slave will send the data). Last bit must be zero which signifies Slave has acknowledge/ACK the command, otherwise NACK which means there is a problem on the communication. Checking the ACK bit is the easiest way to know if Slave is active and is responding to your call.
And that is all there is need to know about I2C. Below is my I2C driver implementation in Verilog HDL,
`timescale 1ns / 1ps
module i2c_top //works on both i2c and SCCB mode(no pullups resistors needed) [NO REPEATED START ALLOWED]
#(parameter main_clock=25_000_000, freq=100_000, addr_bytes=2) //addr_bytes=number of bytes of an address
(
input wire clk, rst_n,
input wire start,stop,
input wire[7:0] wr_data,
output reg rd_tick, //ticks when read data from servant is ready,data will be taken from rd_data
output reg[1:0] ack, //ack[1] ticks at the ack bit[9th bit],ack[0] asserts when ack bit is ACK,else NACK
output wire[7:0] rd_data,
inout scl,sda,
output wire[3:0] state
);
/*
i2c_top #(.freq(100_000)) m0
(
.clk(clk),
.rst_n(rst_n),
.start(start),
.stop(stop),
.wr_data(wr_data),
.rd_tick(rd_tick), //ticks when read data from servant is ready,data will be taken from rd_data
.ack(ack), //ack[1] ticks at the ack bit[9th bit],ack[0] asserts when ack bit is ACK,else NACK
.rd_data(rd_data),
.scl(scl),
.sda(sda)
);
*/
localparam full= (main_clock)/(2*freq),
half= full/2,
counter_width=log2(full);
function integer log2(input integer n); //automatically determines the width needed by counter
integer i;
begin
log2=1;
for(i=0;2**i<n;i=i+1)
log2=i+1;
end
endfunction
//FSM state declarations
localparam[3:0] idle=0,
starting=1,
packet=2,
ack_servant=3,
read=4,
ack_master=5,
stop_1=6,
stop_2=7;
reg[3:0] state_q=idle,state_d;
reg op_q=0,op_d;
reg[3:0] idx_q=0,idx_d;
reg[8:0] wr_data_q=0,wr_data_d;
reg[7:0] rd_data_q,rd_data_d;
reg scl_q=0,scl_d;
reg sda_q=0,sda_d;
reg[counter_width-1:0] counter_q=0,counter_d;
reg[1:0] addr_bytes_q=0,addr_bytes_d;
wire scl_lo,scl_hi;
wire sda_in;
//register operations
always@(posedge clk, negedge rst_n) begin
if(!rst_n) begin
state_q<=idle;
idx_q<=0;
wr_data_q<=0;
scl_q<=0;
sda_q<=0;
counter_q<=0;
rd_data_q<=0;
addr_bytes_q<=0;
end
else begin
state_q<=state_d;
op_q<=op_d;
idx_q<=idx_d;
wr_data_q<=wr_data_d;
scl_q<=scl_d;
sda_q<=sda_d;
counter_q<=counter_d;
rd_data_q<=rd_data_d;
addr_bytes_q<=addr_bytes_d;
end
end
//free-running clk, freq depends on parameter "freq"
always @* begin
counter_d=counter_q+1;
scl_d=scl_q;
if(state_q==idle || state_q==starting) scl_d=1'b1;
else if(counter_q==full) begin
counter_d=0;
scl_d=(scl_q==0)?1'b1:1'b0;
end
end
//FSM next-state logic
always @* begin
state_d=state_q;
op_d=op_q;
idx_d=idx_q;
wr_data_d=wr_data_q;
rd_data_d=rd_data_q;
addr_bytes_d=addr_bytes_q;
sda_d=sda_q;
ack=0;
rd_tick=0;
case(state_q)
idle: begin //wait for the "start" to assert
sda_d=1'b1;
addr_bytes_d=addr_bytes;
if(start==1'b1) begin
wr_data_d={wr_data,1'b1}; //the last 1'b1 is for the ACK coming from the servant("1" means high impedance or "reading")
op_d= (wr_data[0])? 1:0; // if last bit(R/W bit) is one:read operation, else write operation
idx_d=8; //index to be used on transmitting the wr_data serially(MSB first)
state_d=starting;
end
end
starting: if(scl_hi) begin //start command, change sda to low while scl is high
sda_d=0;
state_d=packet;
end
packet: if(scl_lo) begin //transmit wr_data serially(MSB first)
sda_d= (wr_data_q[idx_q]==0)? 0:1'b1;
idx_d= idx_q-1;
if(idx_q==0) begin
state_d=ack_servant;
idx_d=0;
end
end
ack_servant: if(scl_hi) begin //wait for ACK bit response(9th bit) from servant
ack[1]=1;
ack[0]=!sda_in;
wr_data_d={wr_data,1'b1}; //after acknowledge tick, master must have already have the next data it wants to give
addr_bytes_d=addr_bytes_q-1;
if(stop) state_d=stop_1; //master can forcefully stops the transaction(even if response is either NACK or ACK)
else if(op_q && addr_bytes_q==0) begin //start reading after writing addr_bytes of packets for address
idx_d=7;
state_d=read;
end
else begin //write next packet
idx_d=8;
state_d=packet;
end
end
read: if(scl_hi) begin //read data from slave(MSB first)
rd_data_d[idx_q]=sda_in;
idx_d=idx_q-1;
if(idx_q==0) state_d=ack_master;
end
ack_master: if(scl_lo) begin //master must ACK after receiving data from servant
sda_d=1'b0;
if(sda_q==0) begin //one whole bit(two scl_lo) had passed
rd_tick=1;
idx_d=7;
if(stop) state_d=stop_1; //after receiving data, master can opt to stop
else state_d=read; ///after receiving data, master can also just continue receving more data
end
end
stop_1: if(scl_lo) begin
sda_d=1'b0;
state_d=stop_2;
end
stop_2: if(scl_hi) begin
sda_d=1'b1;
state_d=idle;
end
default: state_d=idle;
endcase
end
/*
//i2c output logic
assign scl=scl_q? 1'bz:0; //bidiectional logic for pull-up scl
assign sda=sda_q? 1'bz:0; //bidirectional logic for pull-up scl
assign sda_in=sda;
*/
//sccb output logic
assign scl=scl_q; //sccb scl does not need pull-up
assign sda=(state_q==read || state_q==ack_servant)? 1'bz : sda_q; //sccb sda does not need pull-up
assign sda_in=sda;
/*
TRELLIS_IO #(.DIR("BIDIR")) tristate
(
.B(sda),
.I(sda_q),
.T(temp),
.O(sda_in)
);*/
assign scl_hi= scl_q==1'b1 && counter_q==half && scl==1'b1; //scl is on the middle of a high(1) bit
assign scl_lo= scl_q==1'b0 && counter_q==half; //scl is on the middle of a low(0) bit
assign rd_data=rd_data_q;
assign state=state_q;
endmodule
This I2C driver can be set to any frequency by setting the freq and main_clock.
I2C vs SCCB
Now, what is the difference between the two? Pull-up resistors. If you had played with I2C before, you would know that I2C need pull-ups. In I2C, the Master and Slave never produce a logic 1. It is just either low or high-impedance. High-impedance would be perceived as high by the receiving end because of the pull-ups. But in SCCB, the Master and Slave can produce all three states (high, low, and high-impedance) so there will be no need for pull-up resistors. In my I2C driver, you can choose either SCCB or I2C to use as you can see on the last part of the code (I2C is commented here):
/* //i2c output logic assign scl=scl_q? 1'bz:0; //bidiectional logic for pull-up scl assign sda=sda_q? 1'bz:0; //bidirectional logic for pull-up scl assign sda_in=sda; */ //sccb output logic assign scl=scl_q; //sccb scl does not need pull-up assign sda=(state_q==read || state_q==ack_servant)? 1'bz : sda_q; //sccb sda does not need pull-up assign sda_in=sda;
OV7670 Initialization Sequence
Initialization of the OV7670 camera is very similar to SD card wherein we will need to send some commands to to set its parameters. There are a LOT of control registers we need to set and it will be exhaustive to list and explain it all here. You can access the list of device control register on this pdf (page 11 to 26).
Retrieving Pixel Data
After the initialization sequence, we can now retrieve the pixel data from the camera. This is where the most of the pins of the OV7670 is allocated for. As you might have guessed, pins D0-to-D7 are the pixel data in parallel(1 byte). This pixel data is synchronized to the PCLK coming from the camera. But before PCLK can run, the OV7670 must first have an input clock where the PCLK will be referenced to. And that is what the XCLK is for. The maximum frequency for XCLK is 25MHz.
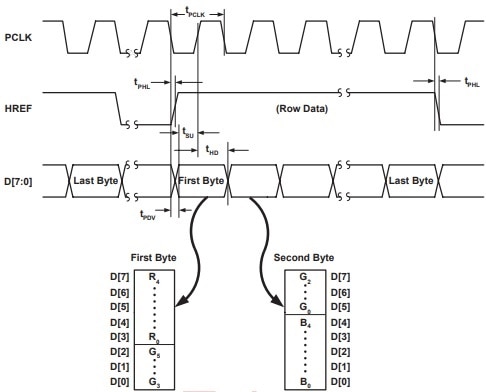
As we can see above, a single pixel has 16 bits (2 bytes) corresponding to RGB565 (5 bits red, 6 bits green, and 5 bits blue for a total of 16 bits). Each data bytes are synchronized to the falling edges of the PCLK (data is stable at rising edges). Since a single pixel has two bytes, two cycles of PCLK are needed to retrieve a single pixel. We just have to continue polling the PCLK pin to detect the rising edges and then store the data pixels. Take note that data pixels are valid if and only if HREF is high. When a frame of 640x480 ended, VSYNC will go high and when the camera is about to start a new frame, VSYNC will go low.
And that is all there is need to know about the basic interfacing with OV7670 camera, here is my camera driver in Verilog HDL,
`timescale 1ns / 1ps
module camera_interface(
input wire clk,rst_n, //100MHz clk
input start_camera, //flag for starting the camera
//triggers to start camera saving
input btn,
input pir_sensor,sound_sensor, temp_sensor,
//camera fifo IO
input wire rd_en,
output empty,
output wire[7:0] dout,
//camera pinouts
input wire cmos_pclk,cmos_href,cmos_vsync,
input wire[7:0] cmos_db,
inout cmos_sda,cmos_scl, //i2c comm wires
output wire cmos_rst_n, cmos_pwdn, cmos_xclk,
//Debugging
output wire[3:0] led
);
//FSM state declarations
localparam idle=0,
start_sccb=1,
write_address=2,
write_data=3,
digest_loop=4,
delay=5,
vsync_fedge=6,
byte1=7,
byte2=8,
fifo_write=9,
stopping=10,
rest=11;
localparam wait_init=0,
sccb_idle=1,
sccb_address=2,
sccb_data=3,
sccb_stop=4;
localparam MSG_INDEX=77; //number of the last index to be digested by SCCB
reg[3:0] state_q=0,state_d;
reg[2:0] sccb_state_q=0,sccb_state_d;
reg[7:0] addr_q,addr_d;
reg[7:0] data_q,data_d;
reg[7:0] brightness_q,brightness_d;
reg[7:0] contrast_q,contrast_d;
reg start,stop;
reg[7:0] wr_data;
reg[3:0] led_q=0,led_d;
reg[27:0] delay_q=0,delay_d;
reg start_delay_q=0,start_delay_d;
reg delay_finish;
reg[15:0] message[250:0];
reg[7:0] message_index_q=0,message_index_d;
reg[15:0] pixel_q,pixel_d;
reg wr_en;
reg[7:0] gray_pixel_q=0,gray_pixel_d;
reg mod2_q=0,mod2_d;
reg[2:0] lines_q,lines_d;
reg[7:0] gray;
wire rd_tick;
wire[1:0] ack;
wire[7:0] rd_data;
wire[3:0] state;
wire full;
wire key0_tick,key1_tick,key2_tick,key3_tick;
reg[18:0] count_q=0,count_d;
//buffer for all inputs coming from the camera
reg pclk_1,pclk_2,href_1,href_2,vsync_1,vsync_2;
initial begin //collection of all adddresses and values to be written in the camera
//{address,data}
message[0]=16'h12_80; //reset all register to default values
message[1]=16'h12_04; //set output format to RGB
message[2]=16'h15_20; //pclk will not toggle during horizontal blank
message[3]=16'h40_d0; //RGB565
// These are values scalped from https://github.com/jonlwowski012/OV7670_NEXYS4_Verilog/blob/master/ov7670_registers_verilog.v
message[4]= 16'h12_04; // COM7, set RGB color output
message[5]= 16'h11_80; // CLKRC internal PLL matches input clock
message[6]= 16'h0C_00; // COM3, default settings
message[7]= 16'h3E_00; // COM14, no scaling, normal pclock
message[8]= 16'h04_00; // COM1, disable CCIR656
message[9]= 16'h40_d0; //COM15, RGB565, full output range
message[10]= 16'h3a_04; //TSLB set correct output data sequence (magic)
message[11]= 16'h14_18; //COM9 MAX AGC value x4 0001_1000
message[12]= 16'h4F_B3; //MTX1 all of these are magical matrix coefficients
message[13]= 16'h50_B3; //MTX2
message[14]= 16'h51_00; //MTX3
message[15]= 16'h52_3d; //MTX4
message[16]= 16'h53_A7; //MTX5
message[17]= 16'h54_E4; //MTX6
message[18]= 16'h58_9E; //MTXS
message[19]= 16'h3D_C0; //COM13 sets gamma enable, does not preserve reserved bits, may be wrong?
message[20]= 16'h17_14; //HSTART start high 8 bits
message[21]= 16'h18_02; //HSTOP stop high 8 bits //these kill the odd colored line
message[22]= 16'h32_80; //HREF edge offset
message[23]= 16'h19_03; //VSTART start high 8 bits
message[24]= 16'h1A_7B; //VSTOP stop high 8 bits
message[25]= 16'h03_0A; //VREF vsync edge offset
message[26]= 16'h0F_41; //COM6 reset timings
message[27]= 16'h1E_00; //MVFP disable mirror / flip //might have magic value of 03
message[28]= 16'h33_0B; //CHLF //magic value from the internet
message[29]= 16'h3C_78; //COM12 no HREF when VSYNC low
message[30]= 16'h69_00; //GFIX fix gain control
message[31]= 16'h74_00; //REG74 Digital gain control
message[32]= 16'hB0_84; //RSVD magic value from the internet *required* for good color
message[33]= 16'hB1_0c; //ABLC1
message[34]= 16'hB2_0e; //RSVD more magic internet values
message[35]= 16'hB3_80; //THL_ST
//begin mystery scaling numbers
message[36]= 16'h70_3a;
message[37]= 16'h71_35;
message[38]= 16'h72_11;
message[39]= 16'h73_f0;
message[40]= 16'ha2_02;
//gamma curve values
message[41]= 16'h7a_20;
message[42]= 16'h7b_10;
message[43]= 16'h7c_1e;
message[44]= 16'h7d_35;
message[45]= 16'h7e_5a;
message[46]= 16'h7f_69;
message[47]= 16'h80_76;
message[48]= 16'h81_80;
message[49]= 16'h82_88;
message[50]= 16'h83_8f;
message[51]= 16'h84_96;
message[52]= 16'h85_a3;
message[53]= 16'h86_af;
message[54]= 16'h87_c4;
message[55]= 16'h88_d7;
message[56]= 16'h89_e8;
//AGC and AEC
message[57]= 16'h13_e0; //COM8, disable AGC / AEC
message[58]= 16'h00_00; //set gain reg to 0 for AGC
message[59]= 16'h10_00; //set ARCJ reg to 0
message[60]= 16'h0d_40; //magic reserved bit for COM4
message[61]= 16'h14_18; //COM9, 4x gain + magic bit
message[62]= 16'ha5_05; // BD50MAX
message[63]= 16'hab_07; //DB60MAX
message[64]= 16'h24_95; //AGC upper limit
message[65]= 16'h25_33; //AGC lower limit
message[66]= 16'h26_e3; //AGC/AEC fast mode op region
message[67]= 16'h9f_78; //HAECC1
message[68]= 16'ha0_68; //HAECC2
message[69]= 16'ha1_03; //magic
message[70]= 16'ha6_d8; //HAECC3
message[71]= 16'ha7_d8; //HAECC4
message[72]= 16'ha8_f0; //HAECC5
message[73]= 16'ha9_90; //HAECC6
message[74]= 16'haa_94; //HAECC7
message[75]= 16'h13_e5; //COM8, enable AGC / AEC
// message[76]= 16'h1E_23; //Mirror Image
message[77]= 16'h69_06; //gain of RGB(manually adjusted)
end
//register operations
always @(posedge clk,negedge rst_n) begin
if(!rst_n) begin
state_q<=0;
led_q<=0;
delay_q<=0;
start_delay_q<=0;
message_index_q<=0;
pixel_q<=0;
gray_pixel_q<=0;
sccb_state_q<=0;
addr_q<=0;
data_q<=0;
brightness_q<=0;
contrast_q<=0;
mod2_q<=0;
count_q<=0;
lines_q<=0;
end
else begin
state_q<=state_d;
led_q<=led_d;
delay_q<=delay_d;
start_delay_q<=start_delay_d;
message_index_q<=message_index_d;
pclk_1<=cmos_pclk;
pclk_2<=pclk_1;
href_1<=cmos_href;
href_2<=href_1;
vsync_1<=cmos_vsync;
vsync_2<=vsync_1;
pixel_q<=pixel_d;
gray_pixel_q<=gray_pixel_d;
sccb_state_q<=sccb_state_d;
addr_q<=addr_d;
data_q<=data_d;
brightness_q<=brightness_d;
contrast_q<=contrast_d;
mod2_q<=mod2_d;
count_q<=count_d;
lines_q<=lines_d;
end
end
//FSM next-state logics
always @* begin
state_d=state_q;
led_d=led_q;
start=0;
stop=0;
wr_data=0;
start_delay_d=start_delay_q;
delay_d=delay_q;
delay_finish=0;
message_index_d=message_index_q;
pixel_d=pixel_q;
gray_pixel_d=gray_pixel_q;
lines_d=lines_q;
wr_en=0;
sccb_state_d=sccb_state_q;
addr_d=addr_q;
data_d=data_q;
brightness_d=brightness_q;
contrast_d=contrast_q;
mod2_d=mod2_q;
count_d=count_q;
//delay logic
if(start_delay_q) delay_d=delay_q+1'b1;
if(delay_q[16] && message_index_q!=(MSG_INDEX+1) && (state_q!=start_sccb)) begin //delay between SCCB transmissions (0.66ms)
delay_finish=1;
start_delay_d=0;
delay_d=0;
end
else if((delay_q[26] && message_index_q==(MSG_INDEX+1)) || (delay_q[26] && state_q==start_sccb)) begin //delay BEFORE SCCB transmission, AFTER SCCB transmission, and BEFORE retrieving pixel data from camera (0.67s)
delay_finish=1;
start_delay_d=0;
delay_d=0;
end
case(state_q)
////////Begin: Setting register values of the camera via SCCB///////////
idle: if(delay_finish && start_camera) begin //idle for 0.6s to start-up the camera
state_d=start_sccb;
start_delay_d=0;
count_d=0;
lines_d=0;
led_d=4'b1000;
end
else start_delay_d=1;
start_sccb: begin //start of SCCB transmission
start=1;
wr_data=8'h42; //slave address of OV7670 for write
state_d=write_address;
led_d=4'b1100;
end
write_address: if(ack==2'b11) begin
wr_data=message[message_index_q][15:8]; //write address
state_d=write_data;
led_d=4'b1110;
end
write_data: if(ack==2'b11) begin
wr_data=message[message_index_q][7:0]; //write data
state_d=digest_loop;
end
digest_loop: if(ack==2'b11) begin //stop sccb transmission
stop=1;
start_delay_d=1;
message_index_d=message_index_q+1'b1;
state_d=delay;
end
delay: begin
if(message_index_q==(MSG_INDEX+1) && delay_finish) begin
state_d=rest; //if all messages are already digested, proceed to retrieving camera pixel data
mod2_d=0;
led_d=4'b1111; //red LEDs
end
else if(state==0 && delay_finish) state_d=start_sccb; //small delay before next SCCB transmission(if all messages are not yet digested)
end
///////////////Begin: Retrieving Pixel Data from Camera to be Stored to SDRAM/////////////////
rest: if(key_tick || pir_sensor || !sound_sensor || temp_sensor) begin
lines_d=0;
state_d=vsync_fedge;
end
vsync_fedge: begin
if(vsync_1==0 && vsync_2==1 && empty && lines_q<5) begin
lines_d=lines_q+1;
state_d=byte1; //vsync falling edge means new frame is incoming
count_d=0;
end
else if(lines_q==5) begin
state_d=rest;
led_d=4'b0110;
end
end
byte1: if(pclk_1==1 && pclk_2==0 && href_1==1 && href_2==1) begin //rising edge of pclk means new pixel data(first byte of 16-bit pixel RGB565) is available at output
//pixel_d[15:8]=cmos_db;
//state_d=byte2;
///////////////
case(lines_q)
1:wr_en=count_q>=0 && count_q<=65535;
2:wr_en=count_q>=65536 && count_q<=131071;
3:wr_en=count_q>=131072 && count_q<=196607;
4:wr_en=count_q>=196608 && count_q<=262143;
5:wr_en=count_q>=262144 && count_q<=327679;
endcase
state_d=byte2;
///////////////
led_d=4'b1001;
end
else if(vsync_1==1 && vsync_2==1) begin
state_d=vsync_fedge;
end
byte2: if(pclk_1==1 && pclk_2==0 && href_1==1 && href_2==1) begin //rising edge of pclk means new pixel data(second byte of 16-bit pixel RGB565) is available at output
//pixel_d[7:0]=cmos_db;
//state_d=fifo_write;
case(lines_q)
1:wr_en=count_q>=0 && count_q<=65535;
2:wr_en=count_q>=65536 && count_q<=131071;
3:wr_en=count_q>=131072 && count_q<=196607;
4:wr_en=count_q>=196608 && count_q<=262143;
5:wr_en=count_q>=262144 && count_q<=327679;
endcase
state_d=byte1;
count_d=(count_q<307200)? (count_q+1'b1):count_q;
end
else if(vsync_1==1 && vsync_2==1) begin
state_d=vsync_fedge;
end
/*fifo_write: begin //write the 16-bit data to asynchronous fifo to be retrieved later by SDRAM
state_d=byte1;
////////////////////////////
gray=(pixel_q[15:11]+(pixel_q[10:5]>>1)+pixel_q[4:0])/3; //RGB to grayscale conversion using averaging method
gray_pixel_d={gray_pixel_q[3:0],gray[3:0]};
mod2_d=mod2_q+1;
wr_en=(mod2_q==1) && count_q<256000; //save data when two gray pixel(8 bytes) are saved on gray_pixel_q;
led_d=wr_en? 4'b1001:4'b0110;
end*/
default: state_d=idle;
endcase
/*
//Logic for increasing/decreasing brightness and contrast via the 4 keybuttons
case(sccb_state_q)
wait_init: if(state_q==byte1) begin //wait for initial SCCB transmission to finish
sccb_state_d=sccb_idle;
addr_d=0;
data_d=0;
brightness_d=8'h00;
contrast_d=8'h40;
end
sccb_idle: if(state==0) begin //wait for any pushbutton
if(key0_tick) begin//increase brightness
brightness_d=(brightness_q[7]==1)? brightness_q-5:brightness_q+5;
if(brightness_q==8'h80) brightness_d=0;
start=1;
wr_data=8'h42; //slave address of OV7670 for write
addr_d=8'h55; //brightness control address
data_d=brightness_d;
sccb_state_d=sccb_address;
led_d=0;
end
if(key1_tick) begin //decrease brightness
brightness_d=(brightness_q[7]==1)? brightness_q+5:brightness_q-5;
if(brightness_q==0) brightness_d=8'h80;
start=1;
wr_data=8'h42;
addr_d=8'h55;
data_d=brightness_d;
sccb_state_d=sccb_address;
led_d=0;
end
else if(key2_tick) begin //increase contrast
contrast_d=contrast_q+5;
start=1;
wr_data=8'h42; //slave address of OV7670 for write
addr_d=8'h56; //contrast control address
data_d=contrast_d;
sccb_state_d=sccb_address;
led_d=0;
end
else if(key3_tick) begin //decrease contrast
contrast_d=contrast_q-5;
start=1;
wr_data=8'h42;
addr_d=8'h56;
data_d=contrast_d;
sccb_state_d=sccb_address;
led_d=0;
end
end
sccb_address: if(ack==2'b11) begin
wr_data=addr_q; //write address
sccb_state_d=sccb_data;
end
sccb_data: if(ack==2'b11) begin
wr_data=data_q; //write databyte
sccb_state_d=sccb_stop;
end
sccb_stop: if(ack==2'b11) begin //stop
stop=1;
sccb_state_d=sccb_idle;
led_d=4'b1001;
end
default: sccb_state_d=wait_init;
endcase
*/
//debug
/*if(count_q<38400) pixel_d={{5{1'b0}},{6{1'b0}},{5{1'b0}}};
else if(count_q<76800) pixel_d={{5{1'b0}},{6{1'b0}},{5{1'b1}}};
else if(count_q<115200) pixel_d={{5{1'b0}},{6{1'b1}},{5{1'b0}}};
else if(count_q<153600) pixel_d={{5{1'b0}},{6{1'b1}},{5{1'b1}}};
else if(count_q<192000) pixel_d={{5{1'b1}},{6{1'b0}},{5{1'b0}}};
else if(count_q<230400) pixel_d={{5{1'b1}},{6{1'b0}},{5{1'b1}}};
else if(count_q<268800) pixel_d={{5{1'b1}},{6{1'b1}},{5{1'b0}}};
else if(count_q<307200) pixel_d={{5{1'b1}},{6{1'b1}},{5{1'b1}}};*/
end
assign cmos_pwdn=0;
assign cmos_rst_n=1;
assign led=led_q;
//module instantiations
i2c_top #(.main_clock(100_000_000), .freq(100_000)) m0
(
.clk(clk),
.rst_n(rst_n),
.start(start),
.stop(stop),
.wr_data(wr_data),
.rd_tick(rd_tick), //ticks when read data from servant is ready,data will be taken from rd_data
.ack(ack), //ack[1] ticks at the ack bit[9th bit],ack[0] asserts when ack bit is ACK,else NACK
.rd_data(rd_data),
.scl(cmos_scl),
.sda(cmos_sda),
.state(state)
);
assign cmos_xclk=clk;
asyn_fifo #(.DATA_WIDTH(8),.FIFO_DEPTH_WIDTH(17)) m2 //2048x8 FIFO mem
(
.rst_n(rst_n),
.clk_write(clk),
.clk_read(clk), //clock input from both domains
.write(wr_en),
.read(rd_en),
//.data_write(gray_pixel_q), //input FROM write clock domain
.data_write(cmos_db),
.data_read(dout), //output TO read clock domain
.full(full),
.empty(empty) //full=sync to write domain clk , empty=sync to read domain clk
//.data_count_r()
);
debounce_explicit m3
(
.clk(clk),
.rst_n(rst_n),
.sw(btn),
.db_level(),
.db_tick(key_tick)
);
endmodule
If you try to read the code, you will notice that I instantiated an asynchronous FIFO (First-in First-out) module. FIFO simply acts as a buffer for the data pixels coming from the camera.
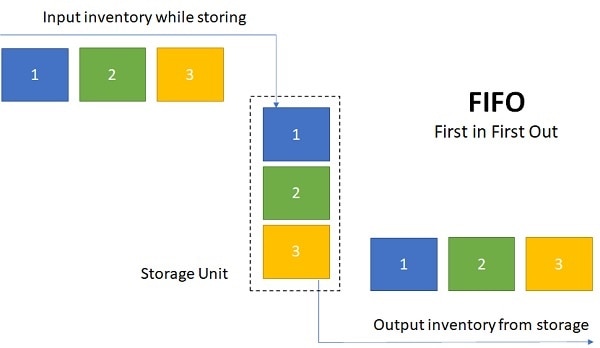
There are two types of FIFO, synchronous and asynchronous FIFO. The difference is that asynchronous FIFO have separate clock domains for read and write. Asynchronous FIFO is what I used here so that it will be much more flexible. This means the receiving end of the data pixels does not need to have the same clock frequency as the camera_interface module.
Here is my asynchronous FIFO module in Verilog HDL,
`timescale 1ns / 1ps
module asyn_fifo
#(
parameter DATA_WIDTH=8,
FIFO_DEPTH_WIDTH=11 //total depth will then be 2**FIFO_DEPTH_WIDTH
)
(
input wire rst_n,
input wire clk_write,clk_read, //clock input from both domains
input wire write,read,
input wire [DATA_WIDTH-1:0] data_write, //input FROM write clock domain
output wire [DATA_WIDTH-1:0] data_read, //output TO read clock domain
output reg full,empty //full=sync to write domain clk , empty=sync to read domain clk
//output reg[FIFO_DEPTH_WIDTH-1:0] data_count_w,data_count_r //counts number of data left in fifo memory(sync to either write or read clk)
);
/*
async_fifo #(.DATA_WIDTH(16),.FIFO_DEPTH_WIDTH(10)) m2 //1024x16 FIFO mem
(
.rst_n(rst_n),
.clk_write(),
.clk_read(), //clock input from both domains
.write(),
.read(),
.data_write(), //input FROM write clock domain
.data_read(), //output TO read clock domain
.full(),
.empty(), //full=sync to write domain clk , empty=sync to read domain clk
..data_count_w(),
.data_count_r() //counts number of data left in fifo memory(sync to either write or read clk)
);
*/
localparam FIFO_DEPTH=2**FIFO_DEPTH_WIDTH;
initial begin
full=0;
empty=1;
end
///////////////////WRITE CLOCK DOMAIN//////////////////////////////
reg[FIFO_DEPTH_WIDTH:0] w_ptr_q=0; //binary counter for write pointer
reg[FIFO_DEPTH_WIDTH:0] r_ptr_sync; //binary pointer for read pointer sync to write clk
wire[FIFO_DEPTH_WIDTH:0] w_grey,w_grey_nxt; //grey counter for write pointer
reg[FIFO_DEPTH_WIDTH:0] r_grey_sync; //grey counter for the read pointer synchronized to write clock
wire we;
reg[5:0] i; //log_2(FIFO_DEPTH_WIDTH)
assign w_grey=w_ptr_q^(w_ptr_q>>1); //binary to grey code conversion for current write pointer
assign w_grey_nxt=(w_ptr_q+1'b1)^((w_ptr_q+1'b1)>>1); //next grey code
assign we= write && !full;
//register operation
always @(posedge clk_write,negedge rst_n) begin
if(!rst_n) begin
w_ptr_q<=0;
full<=0;
end
else begin
if(write && !full) begin //write condition
w_ptr_q<=w_ptr_q+1'b1;
full <= w_grey_nxt == {~r_grey_sync[FIFO_DEPTH_WIDTH:FIFO_DEPTH_WIDTH-1],r_grey_sync[FIFO_DEPTH_WIDTH-2:0]}; //algorithm for full logic which can be observed on the grey code table
end
else full <= w_grey == {~r_grey_sync[FIFO_DEPTH_WIDTH:FIFO_DEPTH_WIDTH-1],r_grey_sync[FIFO_DEPTH_WIDTH-2:0]};
for(i=0;i<=FIFO_DEPTH_WIDTH;i=i+1) r_ptr_sync[i]=^(r_grey_sync>>i); //grey code to binary converter
//data_count_w <= (w_ptr_q>=r_ptr_sync)? (w_ptr_q-r_ptr_sync):(FIFO_DEPTH-r_ptr_sync+w_ptr_q); //compares write pointer and sync read pointer to generate data_count
end
end
/////////////////////////////////////////////////////////////////////
///////////////////READ CLOCK DOMAIN//////////////////////////////
reg[FIFO_DEPTH_WIDTH:0] r_ptr_q=0; //binary counter for read pointer
wire[FIFO_DEPTH_WIDTH:0] r_ptr_d;
reg[FIFO_DEPTH_WIDTH:0] w_ptr_sync; //binary counter for write pointer sync to read clk
reg[FIFO_DEPTH_WIDTH:0] w_grey_sync; //grey counter for the write pointer synchronized to read clock
wire[FIFO_DEPTH_WIDTH:0] r_grey,r_grey_nxt; //grey counter for read pointer
assign r_grey= r_ptr_q^(r_ptr_q>>1); //binary to grey code conversion
assign r_grey_nxt= (r_ptr_q+1'b1)^((r_ptr_q+1'b1)>>1); //next grey code
assign r_ptr_d= (read && !empty)? r_ptr_q+1'b1:r_ptr_q;
//register operation
always @(posedge clk_read,negedge rst_n) begin
if(!rst_n) begin
r_ptr_q<=0;
empty<=1;
end
else begin
r_ptr_q<=r_ptr_d;
if(read && !empty) empty <= r_grey_nxt==w_grey_sync;//empty condition
else empty <= r_grey==w_grey_sync;
for(i=0;i<=FIFO_DEPTH_WIDTH;i=i+1) w_ptr_sync[i]=^(w_grey_sync>>i); //grey code to binary converter
//data_count_r = (w_ptr_q>=r_ptr_sync)? (w_ptr_q-r_ptr_sync):(FIFO_DEPTH-r_ptr_sync+w_ptr_q); //compares read pointer to sync write pointer to generate data_count
end
end
////////////////////////////////////////////////////////////////////////
/////////////////////CLOCK DOMAIN CROSSING//////////////////////////////
reg[FIFO_DEPTH_WIDTH:0] r_grey_sync_temp;
reg[FIFO_DEPTH_WIDTH:0] w_grey_sync_temp;
always @(posedge clk_write) begin //2 D-Flipflops for reduced metastability in clock domain crossing from READ DOMAIN to WRITE DOMAIN
r_grey_sync_temp<=r_grey;
r_grey_sync<=r_grey_sync_temp;
end
always @(posedge clk_read) begin //2 D-Flipflops for reduced metastability in clock domain crossing from WRITE DOMAIN to READ DOMAIN
w_grey_sync_temp<=w_grey;
w_grey_sync<=w_grey_sync_temp;
end
//////////////////////////////////////////////////////////////////////////
//instantiation of dual port block ram
dual_port_sync #(.ADDR_WIDTH(FIFO_DEPTH_WIDTH) , .DATA_WIDTH(DATA_WIDTH)) m0
(
.clk_r(clk_read),
.clk_w(clk_write),
.we(we),
.din(data_write),
.addr_a(w_ptr_q[FIFO_DEPTH_WIDTH-1:0]), //write address
.addr_b(r_ptr_d[FIFO_DEPTH_WIDTH-1:0] ), //read address ,addr_b is already buffered inside this module so we will use the "_d" ptr to advance the data(not "_q")
.dout(data_read)
);
endmodule
//inference template for dual port block ram
module dual_port_sync
#(
parameter ADDR_WIDTH=11, //2k by 8 dual port synchronous ram(16k block ram)
DATA_WIDTH=8
)
(
input clk_r,
input clk_w,
input we,
input[DATA_WIDTH-1:0] din,
input[ADDR_WIDTH-1:0] addr_a,addr_b, //addr_a for write, addr_b for read
output[DATA_WIDTH-1:0] dout
);
reg[DATA_WIDTH-1:0] ram[2**ADDR_WIDTH-1:0];
reg[ADDR_WIDTH-1:0] addr_b_q;
always @(posedge clk_w) begin
if(we) ram[addr_a]<=din;
end
always @(posedge clk_r) begin
addr_b_q<=addr_b;
end
assign dout=ram[addr_b_q];
endmodule
Limitations and Bottlenecks
Now that our camera is ready for action, we can now connect it to the SD card driver. But before that, let us first talk about the the limitations we need to face for this project. Remember that the SD card in SPI mode are relatively much slower than your average SD card running in 4-bit SD mode, this means we cannot directly save videos on it just like a normal video camera. We can only capture images one at a time. The biggest bottleneck in saving images to the SD card is that the CMOD S7 only has 1620Kb of Block Ram. But if we compute the number of bits needed on a single frame of 640x480 image produced by OV7670:
16 bits/pixel * 640 pixels/line * 480 lines/frame =4915200 bits/frame
4915Kb! That is over 3 times of what the CMOD S7 FPGA board can handle. You might think that if we cannot store all one frame to the block ram, then why can't we just skip the block ram and save it directly to the SD card? The SD card is the final destination of the data so why bother storing it first to block ram? AHA! But unfortunately, that will not work because another bottleneck here is the busy time of the SD card after writing a block. Remember on my blog 2 that after writing 512 bytes, the SD card will be busy for some definite time and will hold the SD MISO low. In my SD card (32GB SDHC), busy time takes an average of 1ms. This means that no matter how fast I write the 512 bytes consecutively, I will always be limited to 1ms of write per 512 bytes. This means that in a second, the fastest I can write is:
512 bytes/1ms * 8 bits/byte =4096000 bits/sec
That is NOT enough to cover the whole frame! (4915200 bits). And remember that in one second we have 30 frames(30fps), this means that if we want to save all 30 frames we will need:
4915200 bits/frame * 30 frames/sec =147.46 Kb/sec or 18.4KBytes/sec
HOLY! That is already the speed of a normal SD card in 4-bit SD mode.
So, what should we do now?
Hmmmm, lets see. If we cannot save all 30 frames in one second then let us focus on saving at least one frame. And since the block ram cannot handle one whole frame, then we can just divide the frame into chunks!

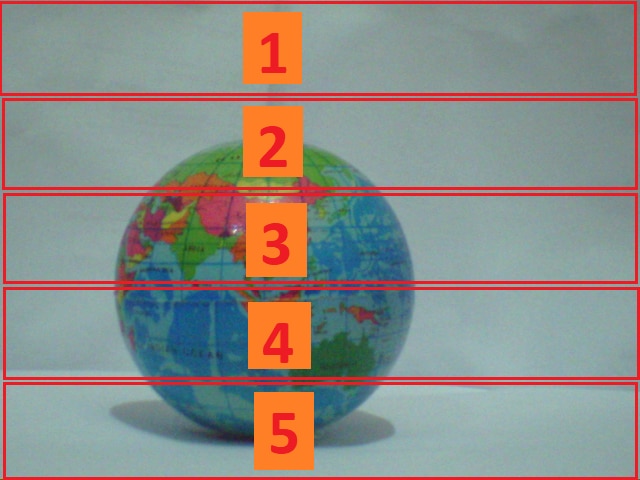
SPOILER ALERT! The image above was captured using the OV7670 camera already. By the way, that is my press ball globe. On the left side, you might perceive it as 1 whole frame. But the truth is that this image consists of 5 frames already. On the right side, you can see that there are 5 chunks. Saving of image data goes like this: Block 1 was saved first. After saving we wait for another frame to save Block 2, after saving we wait again for another frame to save Block 3, and so on. Saving a single 640x480 image with 16 bits per pixel took 1.5 seconds for my 32Gb SD card.
That is my solution for the bottlenecks of this project (divide into chunks, save, then combine together), if you have better ways to do it just comment it down! Now, the code for this is simple, we just have to make the counters that will count in all 640*480=307200 pixels and then divide it by five. Each chunks will be saved to the asyn_fifo. The asyn_fifo has 17 bits for the address for a total of 2^17=131072 bytes of writable addresses. This is already 70% of the block ram of CMOD S7.The camera driver I showed to you earlier has already that modification, the main code that deals with dividing the frames into chunks is:
byte1: if(pclk_1==1 && pclk_2==0 && href_1==1 && href_2==1) begin //rising edge of pclk means new pixel data(first byte of 16-bit pixel RGB565) is available at output
///////////////
case(lines_q)
1:wr_en=count_q>=0 && count_q<=65535;
2:wr_en=count_q>=65536 && count_q<=131071;
3:wr_en=count_q>=131072 && count_q<=196607;
4:wr_en=count_q>=196608 && count_q<=262143;
5:wr_en=count_q>=262144 && count_q<=327679;
endcase
state_d=byte2;
///////////////
led_d=4'b1001;
end
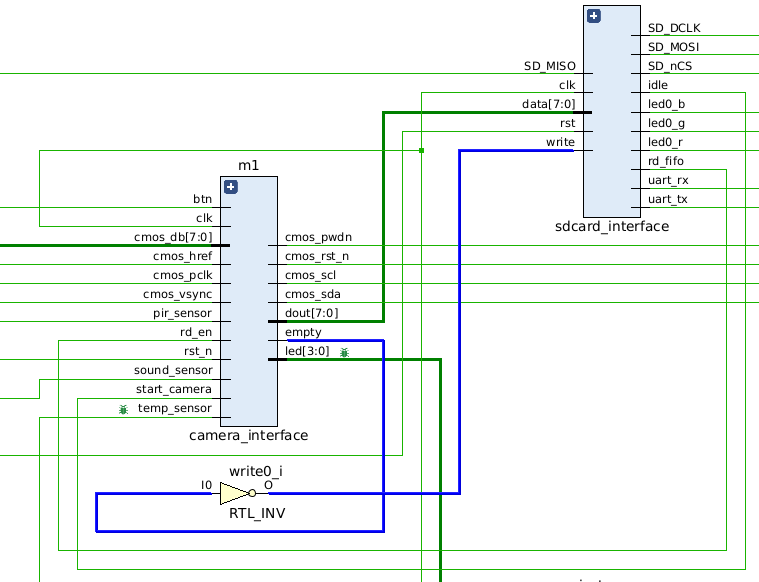
Now, it's time to connect the camera driver and SD card driver. It's pretty straightforward since what we want to do is to trigger the SD card driver to start write operation as long as data is available at the asyn_fifo. This is the same as saying that SD card write operation should start only when asyn_fifo is not empty. Below is the top module that connects all drivers used (mainly the camera driver and SD card driver). Notice how I connected the invert of the empty pin of the camera_interface to the write pin of sdcard_interface:
`timescale 1ns / 1ps
module top_module(
input clk,
input rst,
//triggers to start saving picture to sdcard
input wire btn, //manual capture of camera
input pir_sensor, sound_sensor, //peripherals
//leds for debugging
output wire led0_r,led0_g,led0_b, //{red,green,blue} red if SDCARD initialization is stuck at CMD0, blue if stuck somewhere else, green if initialization complete
output wire[3:0] led , //4 leds on after sdcard initialization
//SPI pinouts
input wire SD_MISO,
output wire SD_MOSI,
output wire SD_DCLK,SD_nCS,
//UART for debugging
output wire uart_rx,uart_tx,
//camera pinouts
input wire cmos_pclk,cmos_href,cmos_vsync,
input wire[7:0] cmos_db,
inout cmos_sda,cmos_scl, //i2c comm wires
output wire cmos_rst_n, cmos_pwdn, cmos_xclk,
//Analog input
input wire vaux5_p, vaux5_n //pin 32
);
localparam TEMP_LIMIT=50; //trigger camera when reached 30 degrees Celsius
wire idle;
wire empty,rd_en_cam;
wire[7:0] dout_cam;
wire[11:0] adc_1;
wire[11:0] temp;
//module instantiations
sdcard_interface m0
(
.clk(clk_out),
.rst(rst),
.led0_r(led0_r),
.led0_g(led0_g),
.led0_b(led0_b), //{red,green,blue} red if SDCARD initialization is stuck at CMD0, blue if stuck somewhere else, green if initialization complete
.idle(idle), //sdcard not busy
//HOST interface
.write({!empty}),
.rd_fifo(rd_en_cam),
.data(dout_cam),
//SPI pinouts
.SD_MISO(SD_MISO),
.SD_MOSI(SD_MOSI),
.SD_DCLK(SD_DCLK),
.SD_nCS(SD_nCS),
//UART for debugging
.uart_rx(uart_rx),
.uart_tx(uart_tx)
);
camera_interface m1
(
.clk(clk_out),
.rst_n({!rst}), //100MHz clk
.start_camera(idle),
//triggers to start camera saving
.pir_sensor(pir_sensor),
.sound_sensor(sound_sensor),
.temp_sensor(fire),
.btn(btn),
//camera fifo IO
.rd_en(rd_en_cam),
.empty(empty),
.dout(dout_cam),
//camera pinouts
.cmos_pclk(cmos_pclk),
.cmos_href(cmos_href),
.cmos_vsync(cmos_vsync),
.cmos_db(cmos_db),
.cmos_sda(cmos_sda),
.cmos_scl(cmos_scl), //i2c comm wires
.cmos_rst_n(cmos_rst_n),
.cmos_pwdn(cmos_pwdn),
//Debugging
.led(led)
);
xadc_interface m2
( //reads ADC output and store to register
.clk(clk),
.rst(rst),
.vaux5_p(vaux5_p),
.vaux5_n(vaux5_n), //pin 32
.adc_1(adc_1) //ADC CODE: adc_0(die temp) , adc_1(pin 32) , adc_2(pin33)
);
clk_wiz_1 m3 //100MHz clk
(
// Clock out ports
.clk_out1(clk_out), //100MHz
.clk_out2(cmos_xclk), //12MHz
// Clock in ports
.clk_in1(clk)
); // input clk_in1
wire fire; //logic 1 if temp is abnormally high
assign temp=adc_1/12; //temp in celsius = [(adc_1/4095)*3.3V]*100Cel/V
assign fire=temp>TEMP_LIMIT;
//assign led=fire? 4'b1111:0;
//temperature sensor data extraction
ila_0 your_instance_name (
.clk(clk), // input wire clk
.probe0(adc_1), // input wire [11:0] probe0
.probe1(temp), // input wire [7:0] probe1
.probe2(fire), // input wire [0:0] probe2
.probe3(led) // input wire [3:0] probe3
);
endmodule
Below is the schematic for the connection of camera_interface and sdcard_interface,
Preview for the Next Blog
Now that the camera driver is connected to the SD card driver, are we finished already? NOT YET, because we are still missing the important pieces that will make this camera a real Security Camera. Next stop: adding peripheral sensors.
6-Part Blog Series
- Security Camera #1: Project Proposal
- Security Camera #2: SD Card Interfacing
- Security Camera #3: Testing the SD Card Driver
- Security Camera #4: Interfacing with OV7670 Camera
- Security Camera #5: Adding Peripheral Sensors
- Security Camera #6: Project Demonstration and Final Words
To see more of my FPGA projects, visit my GitHub account: https://github.com/AngeloJacobo
References
https://circuitdigest.com/microcontroller-projects/how-to-use-ov7670-camera-module-with-arduino
https://www.teachmemicro.com/arduino-camera-ov7670-tutorial/
https://www.circuitbasics.com/basics-of-the-i2c-communication-protocol/
https://www.circuitbasics.com/basics-of-the-i2c-communication-protocol/