


Its been a really fun, sometimes frustrating, sometimes challenging, Twist Turn & Move Challenge.
Thank you to the readers who have provided encouragement, suggestions, conversations, and likes.
The contents of this Season Finale blog will be:
- The Just Ducky Pool Butler Glamour photos
- Introduction to the Pool Butler Crew
- The Pool Butler video in operation (it looks like a blooper video, but its not.) https://youtu.be/OhvB36GJmzY
- The Pool Butler design & testing issues uncovered , water displacement calcs
- Next steps to integrate into "The Just Ducky " Pool Butler 2 product evolution
- The Pool Butler GitHub respository link for one lines, SW and HW archive https://github.com/MechaGary/JustDuckyPoolButler/ (per T&C)
- The Pool Butler BOM, Tools, and TE kit devices used list (per T&C)
- The Pool Butler blog history reference table
1. The Just Ducky Pool Butler glamour photos:
forward

starboard

port

Aft

stern

2. Meet the Just Ducky Pool Butler Crew
Alfred the Butler

Beatrice

Curt

Chico Cantante

Viktor Pato

Sauve and debonair - Pierre will eat and drink all your snacks

If you have a bag of peanuts or M&Ms in your pocket - you do no more. Pete has them.

3. The Pool Butler video in operation (it looks like a blooper video, but its not.) https://youtu.be/OhvB36GJmzY
A huge shoutout to the Tanglewood Holiday Inn who allowed me to test and video in their pool.
4. The Pool Butler design & testing issues uncovered , water displacement calcs
Displacement calcs are pretty easy done in metric
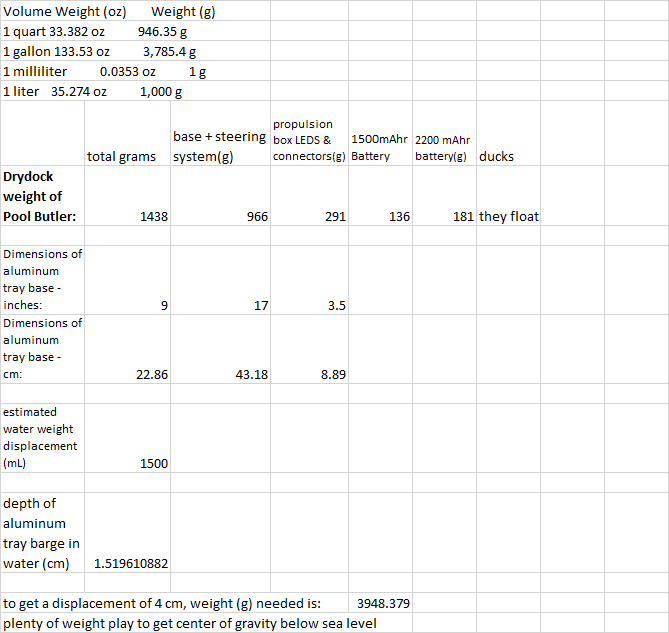
3a. Displacement lines are visible on the outside of the Pool Butler. The water displacement seemed about an inch, a bit more than expected of, but I didnt weigh everything perfectly and the weight balance wasnt perfectly distributed.......BUT IT DIDNT SINK !!!!!! There is plenty of margin to add weight for cargo and other accessories.
3b.MPU 6050 has issues with the roll value integrating to nonsense values. Not sure if the MPU sensor is bad or if the PulseIn command interferes with the Arduino WIre library. To get by the initial test, the roll value & gyro protection interlock was removed in SW.
3c. I started final "in water" buoyancy testing at home in a sizable container at the end of August. When I was ready for big water, I had a great idea to test the Pool Butler at a local duck pond. However, on arrival, the duck pond had been fenced off at the water's edge. I was unaware of that change. RATS, There were some rainy days, by the time the day came to find a pool, the outdoor pools closed here for the fall. foiled again.
So a BIG thank you to the Tanglewood Holiday Inn staff, who kept their outdoor pool open an extra week, and allowed me to test the pool butler in their pool.
3d. As seen in the video, the flat bottomed Pool Butler skated across the water surface, especially with a breeze. The air rudder was too slow to keep up. These need improved.
3e. The airbraking reverse prop did work OK. The forward propulsion was not underpowered and did not burnout YAY !
5. Next steps to integrate into "The Just Ducky " Pool Butler 2 product evolution
- Add qty 3 keels under the flat bottom to add weight for more water displacement and help keep the Pool Butler straight while running
- troubleshoot reason for MPU 6050 roll value misreads
- The Pool Butler's initial design spec called for it to tow a barge with a hook drop control. With the lack of good steering behavior seen, the next design will add a deck to carry beverages directly on the Pool Butler itself.
- More changes to the propulsion and steering. Will go to a dual prop design, a left prop and right prop layout with each having a rudder. This will provide a lower center of gravity and use prop speed as well as air rudder to make steering more precise.
- The stepper motor used for rudder control has too low a gearing, and the home position switch added complexity and unreliability. Better to go with 2 rudders and 2 small servos for rudder positioning.
- I'd leave a small space at the bottom for water accumulation and add a small bilge pump
6. The Pool Butler GitHub respository link for one lines, SW and HW archive https://github.com/MechaGary/JustDuckyPoolButler/ (per T&C)
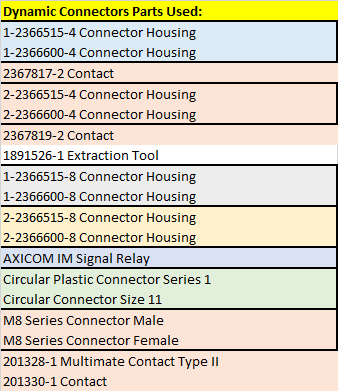
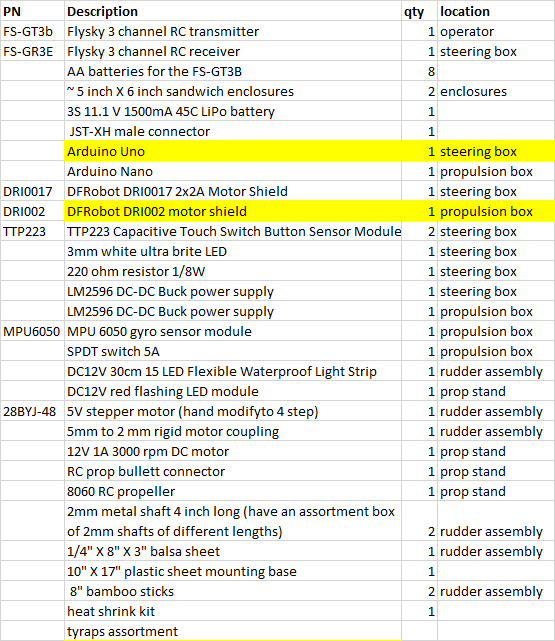
7. The Pool Butler BOM, Tools, and TE kit devices used list (per T&C)
qty 7 types used, 5 types required per T&C 1.8
8. The Pool Butler blog history reference table
| Blog listing | date posted | content |
| Twist, Turn, & Move Design Challenge - Blog #1 - Announcing The Just Ducky Pool Butler | 18-Jul | physical layout proposal and functional one line |
| Pool Butler Blog #2 Twist Turn & Move -the Airboat Propulsion compartment | 29-Jul | 1. building the junk pile strobe tach to measure propeller speed. 2. building of a side project with the MPU 6050 gyro sensor and a SSD1306 display to experiment with that sensor. 3.First build of the propulsion enclosure: 3a.... to test the RC pulse width measure code 3b. ...to measure and chart the motor speed VS DC volts and required amps with the 8060 propeller. |
| Pool Butler Blog#3 Twist Turn & Move - PARTS ARE HERE ! | 1-Aug | TE challenge parts kit visual inspection and count |
| Pool Butler Blog #4 Twist & Turn - Selecting Stepper motors for the Steering, comparison | 8-Aug | engineering & application analysis of 2 different stepper motors to be considered for the steering controls (rudder posiitioning). Includes scope captures of needed step phasing, and conversionof a 5 wire stepper to a4 wire stepper |
| Pool Butler Blog #5 Twist & Turn - Messing with Magnets, Flux lines, Hall effect sensor to find home. | 14-Aug | experiments and observations of the hall effect sensor and magnets for the rudder home switch |
| Pool Butler Blog #6 Twist & Turn - crimping CPC and D-1000 pins with a generic pin crimper | 17-Aug | title says it all |
| Pool Butler Blog #7 Twist & Turn - Technical Foul ? SMD relay on thru hole breadboard | 20-Aug | mounting & wiring the SMD relay on a thru hole board with screw terminals |
| Pool Butler Blog #8 Twist & Turn - The steering system - in too much detail :-) | 24-Aug | 1. The video of the steering operation in drydock. https://youtu.be/54yKQ6vUuSc 2. steering enclosure photos 3. screen shots of the scope timing of the FS_GR3E radio receiver PWM output timing 4. engineering calculations for the stepper motor 5. The steering control system schematic with TE connectors shown 6. Steering system devices , directions and scalings. 7. Steering system software flowchart 8. The Steering system Arduino code with debugging code commented out |
| Pool Butler Blog #9 Twist & Turn - a unique solution for robust Arduino Uno & shield connections | 4-Sep | wire wrap and solder .1 inch header pins to make robust connections to the Arduino Uno and DFRobot shield's IO female socket connections |
| Pool Butler Blog #10 Twist Turn & Move - Propulsion Addendum - schematic, Arduino code, TE connectors, SMD relay card, & photos | 5-Sep | This blog addendum contains: 1.the Pool Butler propulsion controls schematic 2.updated photos showing the provided TE connectors and SMD relay 3.Pool Butler propulsion system Arduino code |
| Pool Butler Blog #11 Twist Turn & Move - The TE connectors used | 7-Sep | Video: https://youtu.be/Bi0jRd8uLH4 |
| Blog #12 Season Finale &The maiden Voyage of the Just Ducky Pool Butler | 9-Sep | 1.The Just Ducky Pool Butler Glamour photos 2. Introduction to the Pool Butler Crew 3.The Pool Butler video in operation (it looks like a blooper video, but its not.) https://youtu.be/OhvB36GJmzY 4.The Pool Butler design & testing issues uncovered , water displacement calcs 5.Next steps to integrate into "The Just Ducky " Pool Butler 2 6.The Pool Butler GitHub respository link for one lines, SW and HW archive https://github.com/MechaGary/JustDuckyPoolButler/ 7.The Pool Butler BOM, Tools, and TE kit devices used list 8.The Pool Butler blog history reference table |
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children