


Howdy! I'm a member of Chicago's hackerspace, The specified item was not found. (website), and we are competing in element14's BeagleBone Black Hackerspace Challenge.

Who?
We are a federally-recognized non-profit organization with over 200 members and turned 4 years old back in April. I shot the above photo at our original space before we moved last year to our current space which is much bigger. I always liked how our logo looked on the wall there... and my photo also catches the most excellent Mitch Altman teaching folks to solder  . Mitch organized element14's last hackerspace challenge: The Great Global Hackerspace Challenge in 2011. The Pumping Station: One (aka PS1) team built an Arduino-based biosensor array with EKG, GSR, CO2 & more.
. Mitch organized element14's last hackerspace challenge: The Great Global Hackerspace Challenge in 2011. The Pumping Station: One (aka PS1) team built an Arduino-based biosensor array with EKG, GSR, CO2 & more.
We have a couple recurring public meetups at our space that has shaped our ideas for the BeagleBone Black (aka BBB) challange:
- NERP (Not Exclusively Raspberry Pi) meetup:
- a bi-weekly meeting with presentations on embedded systems and single board computers
- CNC Build Club meetup:
- a weekly meeting of Chicago area people passionate about learning, building and using digital fabrication equipment
Real-time, real fun!
Many members including myself were very intrigued by the BBB's Programmable Real-Time Units (PRUs) which are two 200-MHz microcontrollers embedded in the BBB's TI Sitara AM3359 processor that run independent of the processor's ARM Cortex A8 core. This means the OS running on the ARM, such as Linux or Android, can offload real-time tasks to the PRUs such as motor control or communication protocols. element14 Community member shabaz has written wonderful tutorials about using the PRU to interface a LCD and also create a thermal imaging camera.
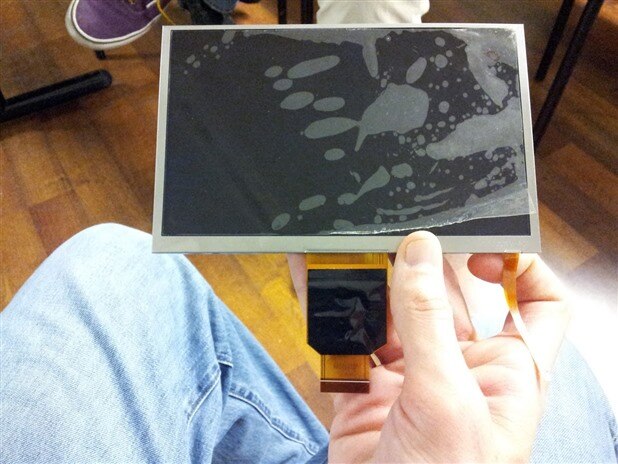
Box o' LCDs:
After having done many Raspberry Pi projects, I'm most excited about the BBB's ample number of GPIO pins as I always wanted to connect an inexpensive, parallel color LCD but was unable to as the Pi lacks enough pins. Another PS1 member, Ste (our FPGA & signal processing guru), brought a pile of donated LCD panels to the space which got us thinking if could interface it with the BBB to setup control panels & kiosks around our space:
However, we eventually determined that we would need to design an adapter board which would probably take too long (given the turnaround time for most batch PCB services - especially if we needed a second order to fix errors in the first revision). We also weren't sure if whether or not the our completed DIY LCD cape would actually be much cheaper that the CircuitCo 7" LCD Cape to make it worthwhile.
PS1's Pick-n-Place project:
Several members have been collaborating on a project to produce a Pick and Place machine. PnP machines are robotic assembly devices that place electronic components on circuit boards as part of the soldering process. Motion control and computer vision are key ingredients. The goal is to eventually use computer vision software (like OpenCV) to correct misaligned parts and verify correct placement. The current prototype relies on dead-reckoning. Here is an early prototype that was presented at NERP back in February:
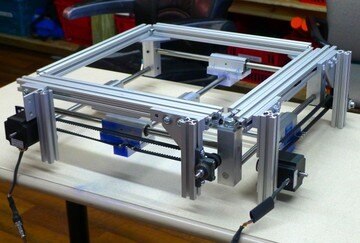
Pick-n-Place machine gantry Ver 0.3a in development (Ed_B)
A couple members involved in the project have moved on to other endeavors, but Ed has continued to work on his gantry build. He presented a demo at our last NERP meeting:
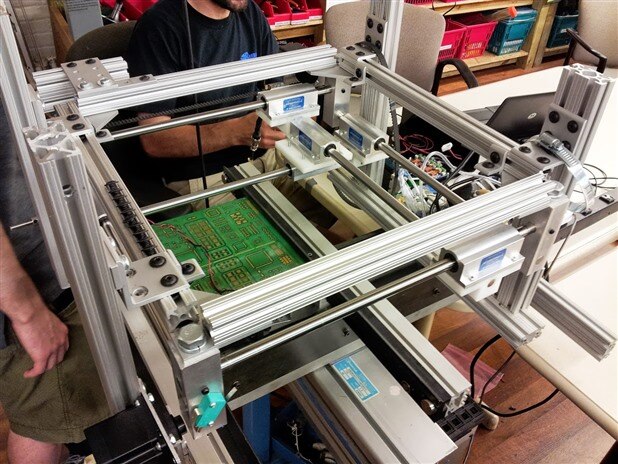
It is using the TinyG motor controller board, and he was sending it G-code from demo files on a Raspberry Pi over serial:

BeagleBone Black makeover:
We decided that a worthy goal for the challenge would be to replace the TinyG and Pi with just the BeagleBone Black. The PRUs should be capable of generating the step and direction signals for a stepper motor driver IC like the TI DRV8825 . Software to generate G-code from a board layout (a centroid file) can run on the BBB. The G-code can then be transformed into an array of movements that is passed to the PRU program.
In my next post, I'll describe the different approaches we've explored so far and what our current course of action is.
And now for something completely unrelated...
I can't conclude an introduction of our hackerspace without mentioning that we have a working Scanning Electron Microscope (SEM) takes beautiful photos. It's also suprisingly interactive; here's Steve flying around the microscopic world:

And here's 10 micron-tall letters and numbers etched on to an Analog Devices IC die from 2007:

Happy Hacking,
Drew
Top Comments