


 Arty-S7-Rover (sensor+actuator)
Arty-S7-Rover (sensor+actuator)
Disclaimer
Add a sensor to your project with the Arty S7, 7 Ways to Leave Your Spartan-6 FPGA
challenge.
The Arty-S7-Rover is a small functional autonomous vehicle based on the Digilent Arty S7-50 board. The project was done for the 7 Ways to Leave Your Spartan-6 FPGA challenge.
All the files are open-source, MIT license and can be downloaded from ![]() -
-
Sensor + Actuator
In this second part, a range ultrasound sensor and a 2xDC motor driver would be implemented.
If you have not read it yet, please check the first blog Arty-S7-Rover (base architecture) as this section rely on that.
The Hardware
 Ultrasonic HC-SR04 distance sensor
Ultrasonic HC-SR04 distance sensor
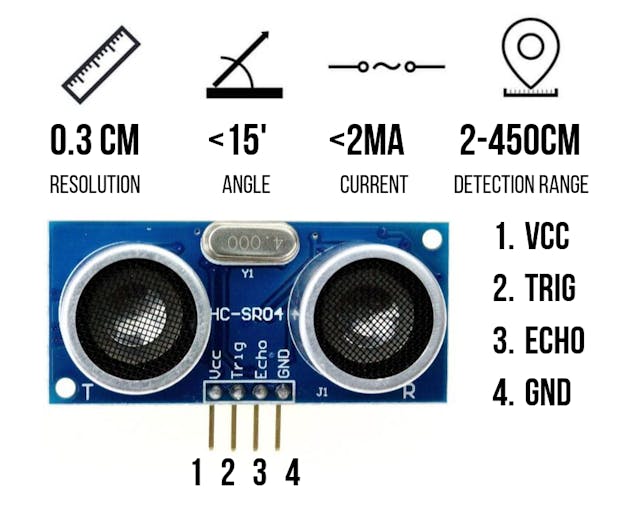  |
Features - Ranging distance: 2cm to 4m - Ranging accuracy: 3mm - Operating Voltage: 5V - Current: 15 mA - Frequency: 40 Hz - Measuring angle: 30 degrees - Effectual angle: 15 degrees |
The HC-SR04 is a commonly used ultrasonic distance sensor. An inexpensive device with high enough accuracy for robot projects with plenty of tutorials and examples on the web. Most of the implementations around use a microcontroller which requires several calculations with idle time while waiting on the sensor response.
One caveat is that the sensor works with 5Vdc, and although it can work at 3.3Vdc, its performance is highly diminished. Fortunately, the input trigger works fine with a 3.3Vdc input signal, and for the output, a simple resistance divisor suffices.

Ultrasonic Sensor Voltage Divisor
References
DC Motor Driver
The Arty-S7-ROVER has two 12V/40W DC motors. The ZK-5AD with two TA6586 monolithic IC can drive both motors with a full H-bridge for bi-directional control.
- Working Voltage: DC 3.0V-14V
- Input Signal Voltage: DC 2.2V-6.0V
- Drive Current: 5A
- Standby Current: 10uA
- Working Temperature:-20 to 85 Celsius
As with any H-Bridge, it can be controlled with two PMW per motor to move forward or backward.
| DC Motor 1 | D0 | D1 | D2 | D3 |
|---|---|---|---|---|
| Forward | PMW | 0 | ||
| Reverse | 0 | PWM | ||
| Stop | 0 | 0 | ||
| Brake | 1 | 1 |
| DC Motor 2 | D0 | D1 | D2 | D3 |
|---|---|---|---|---|
| Forward | PWM | 0 | ||
| Reverse | 0 | PWM | ||
| Stop | 0 | 0 | ||
| Brake | 1 | 1 |


ZK-5AD DC Motor Driver
DC Motors
For the Arty-S7-ROVER I am using two CHIHAI GM37-550 DC motor with a gear ratio of 50:1 and 12Vdc with a maximum input power of 40W.
These motors are kind of powerful. I am using them as that is the chassis and hardware I already have from a previous project.

CHIHAI GM37-550 DC motor
RTL
DC Motors PWM
The DC motors are controlled by four independent PWM blocks. All have the same PWM frequency of 500 Hz1.
// Final DC motors PWM setup const uint32_t MOTOR_PWM_FREQ = 500; const uint32_t MOTOR_FULL_STOP = 0; const uint32_t MOTOR_SLOW_SPEED = uint32_t(0.3 * CLK_FREQ/MOTOR_PWM_FREQ); const uint32_t MOTOR_MEDIUM_SPEED = uint32_t(0.5 * CLK_FREQ/MOTOR_PWM_FREQ); const uint32_t MOTOR_HIGH_SPEED = uint32_t(0.8 * CLK_FREQ/MOTOR_PWM_FREQ);
The DC motors required special care, as only one PWM per motor should be working at the time. The control of the motors was done primarily with FW. As the motors present different behaviours while moving backward or forward, and even between motors - having four independent PWM channels (2 per motor) was ideal as this enabled the possibility of fine-tuning each motor movement. In this project, this was done on a trial and error basis, but it is planned to automate this by adding extra sensors on each wheel.
The firmware is aware of the current direction and speed, and on a direction/speed change request it performs the required steps as slowing and stopping first before changing direction.
// --------------------------------------------------------------------------------
// Dual DC Motor Control (ZK-5AD / IC:TA6586)
//
// M1: [ D0 | D1 ]
// 0 0 : Stop
// PMW 0 : FWD
// 0 PMW : BWD
// 1 1 : Brake
//
// M2: [D2 | D3] -> same as M1
// --------------------------------------------------------------------------------
#pragma once
// --------------------------------------------------------------------------------
#include <math.h>
// --------------------------------------------------------------------------------
inline int calc_duty_cycle(int vl) {
return ( (vl*1000)/256 )/10;
}
// --------------------------------------------------------------------------------
enum class eDualMotorDirection {
BACKWARDS = 0,
FORWARDS = 1,
LEFT = 2,
RIGHT = 3,
STOP = 4
};
extern const char* eDualMotorDirection_Names[];
enum class eDualMotorFSM { IDLE, STOPPING, ACCEL, DEACCEL };
// --------------------------------------------------------------------------------
class clDualDC_MotorCtrl {
public:
int min_speed;
int max_speed;
int speed_step; // Speed MUST be int div of MAX_SPEED and MIN_SPEED
int accel_step_ms; // time to wait between speed changes in ms
clDualDC_MotorCtrl(int PWMFreq=5000, int PWMResolution=8, int min_speed=32, int max_speed=0, int speed_step=8, int accel_step_ms=1)
: min_speed(min_speed)
, max_speed(max_speed)
, speed_step(speed_step)
, accel_step_ms(accel_step_ms)
, _PWMFreq(PWMFreq)
, _PWMResolution(PWMResolution)
, _speed(0)
, _direction(eDualMotorDirection::STOP)
, _last_update(0)
, _status(eDualMotorFSM::IDLE)
, _target_speed(0)
, _target_direction(eDualMotorDirection::STOP)
//, _set_func({&set_bwd, &set_fwd, &set_lft, &set_rgt})
{
if(max_speed) {
this->max_speed = (int)(pow(2, PWMResolution));
}
while( (max_speed-min_speed)%speed_step != 0) {
--speed_step;
}
_set_func[static_cast<size_t>(eDualMotorDirection::BACKWARDS)] = &clDualDC_MotorCtrl::set_bwd;
_set_func[static_cast<size_t>(eDualMotorDirection::FORWARDS)] = &clDualDC_MotorCtrl::set_fwd;
_set_func[static_cast<size_t>(eDualMotorDirection::LEFT)] = &clDualDC_MotorCtrl::set_lft;
_set_func[static_cast<size_t>(eDualMotorDirection::RIGHT)] = &clDualDC_MotorCtrl::set_rgt;
}
void init(void);
void loop(void);
//void halt_break(void);
void move(int speed, eDualMotorDirection direction) { step_start(speed, direction); }
void stop(void) { step_start(0, eDualMotorDirection::STOP); }
void move_forward(int speed) { step_start(speed, eDualMotorDirection::FORWARDS); }
void move_backward(int speed) { step_start(speed, eDualMotorDirection::BACKWARDS); }
void turn_left(int speed) { step_start(speed, eDualMotorDirection::LEFT); }
void turn_right(int speed) { step_start(speed, eDualMotorDirection::RIGHT); }
void emergency_stop(void) { _speed = 0; _direction = eDualMotorDirection::STOP; set_fwd(); }
private:
int _PWMFreq = 5000; /* 5 KHz */
int _PWMResolution = 8;
int _speed;
eDualMotorDirection _direction;
long _last_update;
eDualMotorFSM _status;
int _target_speed;
eDualMotorDirection _target_direction;
void step_start(int target_speed, eDualMotorDirection target_direction);
void step(void);
void set_fwd(void) {
wRITE_IO(M0_FWD_PWM_REG, _speed);
wRITE_IO(M1_FWD_PWM_REG, _speed);
}
void set_bwd(void) {
wRITE_IO(M0_BWD_PWM_REG, _speed);
wRITE_IO(M1_BWD_PWM_REG, _speed);
}
void set_lft(void) {
wRITE_IO(M0_BWD_PWM_REG, _speed);
wRITE_IO(M1_FWD_PWM_REG, _speed);
}
void set_rgt(void) {
wRITE_IO(M0_FWD_PWM_REG, _speed);
wRITE_IO(M1_BWD_PWM_REG, _speed);
}
typedef void (clDualDC_MotorCtrl::*fptr_set_func)(void);
fptr_set_func _set_func[4];
};
// --------------------------------------------------------------------------------
extern clDualDC_MotorCtrl DualDC_MotorCtrl;
// --------------------------------------------------------------------------------
#include "dc_motors_pwm.h"
// TODO: add all func to array of functions
// --------------------------------------------------------------------------------
const char* eDualMotorDirection_Names[] = {
"BACKWARDS",
"FORWARDS",
"LEFT",
"RIGHT",
"STOP"
};
// --------------------------------------------------------------------------------
void clDualDC_MotorCtrl::init(void)
{
for(auto inx=0; inx<4; ++inx) {
wRITE_IO(pwm_channels[inx], 0);
}
}
// --------------------------------------------------------------------------------
void clDualDC_MotorCtrl::loop(void) {
if(curr_millis - _last_update > accel_step_ms) {
_last_update = curr_millis;
if(_status!=eDualMotorFSM::IDLE) {
step();
}
}
}
// --------------------------------------------------------------------------------
void clDualDC_MotorCtrl::step_start(int target_speed, eDualMotorDirection target_direction) {
if(target_speed < min_speed) {
target_speed = 0;
target_direction = eDualMotorDirection::STOP;
} else {
if(target_speed > max_speed) {
target_speed = max_speed;
}
}
_target_speed = target_speed;
_target_direction = target_direction;
if(_target_direction != _direction) {
_status = eDualMotorFSM::STOPPING;
} else {
if(_target_speed != _speed) {
_status = (_target_speed > _speed) ? (eDualMotorFSM::ACCEL) : (eDualMotorFSM::DEACCEL);
}
}
step();
}
// --------------------------------------------------------------------------------
void clDualDC_MotorCtrl::step(void) {
switch(_status)
{
case eDualMotorFSM::IDLE: {
break;
}
case eDualMotorFSM::STOPPING: {
_speed -= speed_step;
if(_speed < min_speed) {
_speed = 0;
}
(this->*_set_func[static_cast<size_t>(_direction)])();
if(_speed == 0) {
_direction = _target_direction;
if(_target_speed != 0) {
_status = eDualMotorFSM::ACCEL;
} else {
_status = eDualMotorFSM::IDLE;
}
}
break;
}
case eDualMotorFSM::ACCEL: {
if(_speed < _target_speed) {
_speed += speed_step;
}
(this->*_set_func[static_cast<size_t>(_direction)])();
if(_speed == _target_speed) {
_status = eDualMotorFSM::IDLE;
}
break;
}
case eDualMotorFSM::DEACCEL: {
if(_speed > _target_speed) {
_speed -= speed_step;
}
(this->*_set_func[static_cast<size_t>(_direction)])();
if(_speed == _target_speed) {
_status = eDualMotorFSM::IDLE;
}
break;
}
}
}
// --------------------------------------------------------------------------------
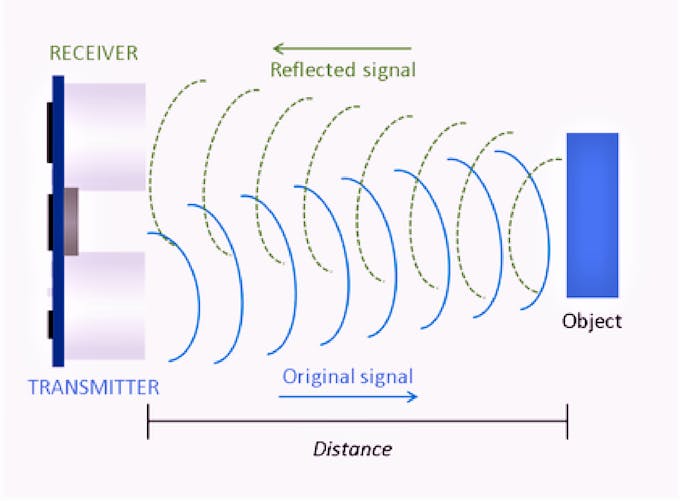
Sensing Distance with sound waves
The HC-SR04 works as follows:
- An input of 10us pulse on the input trigger pin starts the process
- The sensor sends 8x 40KHz pulses over the air
- The echo pin generates a pulse whose duration is equivalent to the time of flight of the signal forward and backward

Ultrasonic Sensor Timing IO diagram
The controller is responsible for generating the trigger and measuring the duration of the echo pulse which is used later for estimating the distance. As this is an FPGA project  , the HDL block was designed to autonomously generate a continuous ping for distance and continuously update a register. The RISC-V FW poll for the distance as required.
, the HDL block was designed to autonomously generate a continuous ping for distance and continuously update a register. The RISC-V FW poll for the distance as required.

Ultrasonic Sensor Block IO diagram
module hc_sr04_distance_sensor
#(
parameter CLK_FREQ = 100000000,
parameter PING_FREQ = 100,
parameter TRIG_DURATION_US = 10,
parameter MAX_DISTANCE_M = 4,
parameter O_WL = 32
)
(
input wire reset,
input wire clk,
output logic sn_trigger,
input wire sn_edge,
output logic o_valid,
output logic [O_WL-1:0] edge_ticks
);
localparam SOUND_SPEED_M_S = 340;
localparam real MAX_TIME = ((2.0*MAX_DISTANCE_M)/SOUND_SPEED_M_S);
localparam EDGE_CNT_WL = $clog2(int'(real'(CLK_FREQ)*MAX_TIME));
localparam PING_CNT = int'(CLK_FREQ/PING_FREQ);
localparam TRIG_CNT = int'((TRIG_DURATION_US*CLK_FREQ)/1e6);
localparam PING_CNT_WL = $clog2(PING_CNT+TRIG_CNT+1);
logic [PING_CNT_WL-1:0] ping_trigg_cnt;
always_ff @( posedge clk ) begin: distance_sensor_trigger_proc
if(reset) begin
ping_trigg_cnt <= '0;
sn_trigger <= '0;
end else begin
if(ping_trigg_cnt < (PING_CNT+TRIG_CNT)) begin
ping_trigg_cnt <= ping_trigg_cnt + 1;
end else begin
ping_trigg_cnt <= '0;
end
sn_trigger <= (ping_trigg_cnt < PING_CNT) ? (0) : (1);
end
end: distance_sensor_trigger_proc
logic edge_d;
logic [EDGE_CNT_WL-1:0] edge_cnt;
always_ff @( posedge clk ) begin: distance_sensor_measure_proc
if(reset) begin
edge_d <= 1'b0;
edge_cnt <= '0;
o_valid <= 1'b0;
edge_ticks <= '0;
end else begin
edge_d <= sn_edge;
if(edge_d && !sn_edge) begin
edge_cnt <= '0;
o_valid <= 1;
edge_ticks <= '0;
edge_ticks[O_WL-1:0] <= edge_cnt;
end else begin
o_valid <= 0;
if(sn_edge) begin
if(edge_cnt != '1) begin
edge_cnt <= edge_cnt + 1;
end
end
end
end
end: distance_sensor_measure_proc
endmodule: hc_sr04_distance_sensor
The distance in cm is calculated as $34000t$ (as measured by the HDL, or $N_{cycles}*CLK_{FREQ}$)
Converting the measured value from clock-cycles count to
cmis required for human reading purposes. There is no actual need to convert it and internally, it is possible to work with the cycles count as it is to control the rover.
Lab Test
A small FW was done to test the distance sensor against the rover's speed.
Arty-S7-Rover Distance Sensor Lab Test Demo-Video
A snippet of the code is presented below, the full FW can be downloaded from the repository.
#include<cstdint>
#include "memory_map.h"
const uint32_t CLK_FREQ = 100000000UL;
const uint32_t MSB_MASK = 0x80000000;
const uint32_t RGB_PWM_FREQ = 20000;
const uint32_t RGB_DCYLE = uint32_t(0.01 * CLK_FREQ/RGB_PWM_FREQ);
const uint32_t MOTOR_PWM_FREQ = 500;
const uint32_t MOTOR_FULL_STOP = 0;
const uint32_t MOTOR_SLOW_SPEED = uint32_t(0.3 * CLK_FREQ/MOTOR_PWM_FREQ);
const uint32_t MOTOR_MEDIUM_SPEED = uint32_t(0.5 * CLK_FREQ/MOTOR_PWM_FREQ);
const uint32_t MOTOR_HIGH_SPEED = uint32_t(0.8 * CLK_FREQ/MOTOR_PWM_FREQ);
// Distance calc.
// n-ticks, 1/clk_freq * N = t
// d = s*t = 34000 cm/s * 1/clk_freq * N
// -> ticks: d = 34000 cm/s * 1/clk_freq * N
// N = d*clk_freq/34000
#define D2CNT(D) (uint32_t)((2*D*CLK_FREQ)/34000UL)
const uint32_t DISTANCE_STOP = D2CNT(10);
const uint32_t DISTANCE_SLOW = D2CNT(50);
const uint32_t DISTANCE_MEDIUM = D2CNT(100);
// -------------------------------------------------------------------
int main(void) {
...
for(;;) {
// Wait for user button to start test
send_msg(press_btn);
do {
btn = READ_IO(BUTTONS_REG);
// Simple code to check FW and HW programmed
sw = READ_IO(SWITCHES_REG);
leds_st = sw;
} while(btn==0x00);
// Setup test
rpt_cnt = 0;
motor_curr_speed = MOTOR_HIGH_SPEED;
while(motor_curr_speed!=MOTOR_FULL_STOP) {
frnt_distance_rd = READ_IO(DST_SENSOR_RD_REG);
if(frnt_distance_rd & MSB_MASK) {
frnt_distance_rd &= ~MSB_MASK;
if(frnt_distance_rd <= DISTANCE_STOP) {
motor_curr_speed = MOTOR_FULL_STOP;
rgb0 = 0x01;
rgb1 = 0x01;
}
else if (frnt_distance_rd <= DISTANCE_SLOW) {
motor_curr_speed = MOTOR_SLOW_SPEED;
rgb0 = 0x02;
rgb1 = 0x02;
}
else if (frnt_distance_rd <= DISTANCE_MEDIUM) {
motor_curr_speed = MOTOR_MEDIUM_SPEED;
rgb0 = 0x04;
rgb1 = 0x04;
}
else {
motor_curr_speed = MOTOR_HIGH_SPEED;
rgb0 = 0x07;
rgb1 = 0x07;
}
} // if new distance read
// Move FWD
WRITE_IO(M0_BWD_PWM_REG, MOTOR_FULL_STOP);
WRITE_IO(M0_FWD_PWM_REG, motor_curr_speed);
WRITE_IO(M1_BWD_PWM_REG, MOTOR_FULL_STOP);
WRITE_IO(M1_FWD_PWM_REG, motor_curr_speed);
// Update LEDs
...
// UART
...
} // end while moving
} // forever
return 0;
}
Averaging the measured distance
As seen in the video, by using the instantaneous measurement, the rover can instantly request changes to the speed - as some measurements can be erroneous. To mitigate this effect, an average value was used instead. Two options are possible for this:
- FW implementation
- RTL implementation
Given the abundant resources in the Spartan-7, it made more sense to have done the average in the FPGA as an extra IP block. By doing so, less computing power was required from the RISC-V softcore, which can become an issue in the future as the project evolve.
The implementation is called a Moving Average Filter.

Moving Average Filter Block IO diagram
In addition to the average filter, a step acceleration change was added to the FW to improve speed change and avoid abrupt changes.
Arty-S7-Rover Distance Sensor Lab Test 2 Demo-Video.
...
const uint32_t MOTOR_PWM_FREQ = 500;
const uint32_t MOTOR_FULL_STOP = 0;
const uint32_t MOTOR_SLOW_SPEED = (uint32_t)(0.3 * CLK_FREQ/MOTOR_PWM_FREQ);
const uint32_t MOTOR_MEDIUM_SPEED = (uint32_t)(0.5 * CLK_FREQ/MOTOR_PWM_FREQ);
const uint32_t MOTOR_HIGH_SPEED = (uint32_t)(0.8 * CLK_FREQ/MOTOR_PWM_FREQ);
const uint32_t MOTOR_SPEED_STEP = (uint32_t)((1.0*MOTOR_HIGH_SPEED-MOTOR_SLOW_SPEED)/100);
const uint32_t MOTOR_SPEED_CHNG_RATE = 20000;
// Distance calc.
...
const uint32_t DISTANCE_STOP = D2CNT(20);
const uint32_t DISTANCE_SLOW = D2CNT(60);
const uint32_t DISTANCE_MEDIUM = D2CNT(100);
// -------------------------------------------------------------------
int main(void) {
...
for(;;) {
// Wait for user button to start test
send_msg(press_btn);
do {
btn = READ_IO(BUTTONS_REG);
// Simple code to check FW and HW programmed
sw = READ_IO(SWITCHES_REG);
leds_st = sw;
} while(btn==0x00);
// Setup test
rpt_cnt = 0;
msg_rpt_inx = 0;
motor_curr_speed = MOTOR_SLOW_SPEED;
motor_rate_cnt = MOTOR_SPEED_CHNG_RATE;
while(motor_curr_speed!=MOTOR_FULL_STOP) {
// Simple code to check FW and HW programmed
sw = READ_IO(SWITCHES_REG);
leds_st = sw;
frnt_distance_rd = READ_IO(DST_SENSOR_RD_REG);
if(frnt_distance_rd & MSB_MASK) {
frnt_distance_rd &= ~MSB_MASK;
if(frnt_distance_rd <= DISTANCE_STOP) {
motor_curr_speed = MOTOR_FULL_STOP;
rgb0 = 0x01;
rgb1 = 0x01;
}
else if (frnt_distance_rd <= DISTANCE_SLOW) {
motor_curr_speed = MOTOR_SLOW_SPEED;
rgb0 = 0x02;
rgb1 = 0x02;
}
else if (frnt_distance_rd <= DISTANCE_MEDIUM) {
motor_curr_speed = MOTOR_MEDIUM_SPEED;
rgb0 = 0x04;
rgb1 = 0x04;
}
else {
if(motor_curr_speed < MOTOR_HIGH_SPEED) {
--motor_rate_cnt;
if(motor_rate_cnt==0) {
motor_curr_speed += MOTOR_SPEED_STEP;
motor_rate_cnt = MOTOR_SPEED_CHNG_RATE;
}
} else {
motor_curr_speed = MOTOR_HIGH_SPEED;
}
rgb0 = 0x07;
rgb1 = 0x07;
}
} // if new distance read
// Move FWD
...
// Update LEDs
...
// UART
...
} // end while moving
} // forever
return 0;
}
Final Remarks
The versatility of the Spartan 7 was amazing:
-
Able to generate as many PWM blocks as required
-
Total independent IP block for sensor control
- Free processor time
- Highly configurable
-
Easy to add extra blocks like Digital filters as required like a Moving Average FIR.
- Testing new ideas was straightforward.
-
... and all of that without increasing the soft core processor load!
Arty-S7-Rover (experiments) 