


Introduction
This project is a follow up from the previous project on porting the PYNQ framework to the ZC702 development board.
In this article we will show how to leverage the xOpenCV framework in conjunction with the PYNQ framework to implement a basic image processing pipeline on ZYNQ series FPGA SoC .
The project will be developed on a ZC702 development board using a generic USB camera.
Now , we will look at developing an end to end system for resizing live video using the FPGA side of the ZYNQ. Why resize video on the fly?
Well, most of the modern neural networks need images in a specific resolution so all the acquired frames have to be resized prior to passing them through the network.
Image resizing can be done quite easily on a sequential processor using OpenCV or handcrafted code at the expense of speed of course.
FPGA's on the other hand easily allow for a gain of at least 10x in most image processing applications.
Then we will develop the Vivado hardware called an overlay in PYNQ parlance. Then we will look at the Python notebook code used to control the video resizing operation in HW.
Hardware
The ZC702 does not have a full sized USB port so a USB hub has to be used. Luckily the development platform comes with a Target 4 port USB hub that plugs into the USB
micro port of the development board. This is a USB host port so it allows using standard USB cameras. A generic USB camera can then be lugged into the USB hub.
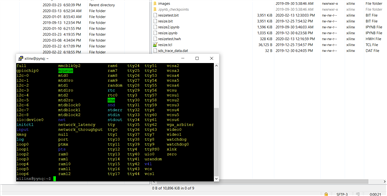
This will enumerate as a /video device under /dev folder on PYNQ distro as shown below.
There are other options for using an image source such as CMOS cameras, camera with HDMI output or even RTSP (Real Time Streaming Protocol) video streams from IP cameras.


Developing Image processing IP's
Developing IP blocks for image processing is a task that can be accomplished in multiple ways.
The typical design of IP cores in the involves writing test benches for the DUT and simulating the designs using PGM or BMP data for the image files.
Implementing this in Verilog/System Verilog or VHDL requires some non-trivial infrastructure.
Higher level frameworks such as can all be used .
a) MATLAB
b) Chisel (Scala)
c) MyHDL (Python)
d) Vivado HLS (C/C++)
The IP used is the resize IP from the XfOpenCV Revision library.
As of early 2020 6 versions of the the xfOpenCV revision library has been released by Xilinx. Vivado HLS video library may soon be deprecated according to the Xilinx Github commentary.
The XfOpenCV Revision framework is a set of kernels and image processing primitives that replicate the functionality of OpenCV library kernels.
In simple terms this allows executing a function such as Gaussian(image_in_image_out, mju, sigma) completely in hardware by accelerating it by 40-100x fold. Even better you can control power consumption by controlling for area (number of PE (processing elements)) and latency.
In this tutorial we will have used Vivado HLS to generate the cores with standard interfaces and the XfOpenCV revision library
to provide the underlying image processing kernels.
The xfOpenCV resize IP will be refactored with an AXI stream interface.
The focus of this article however would be on the Vivado HW design and the PYNQ notebook design,
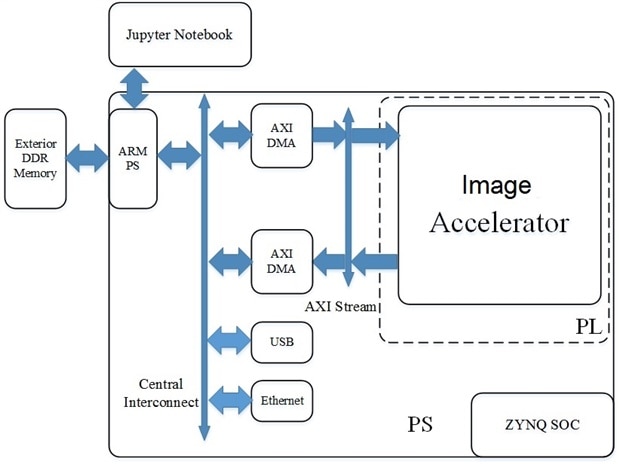
The block diagram below shows the gist of what the project will implement using PYNQ.
Designing the image processing pipeline
The Vivado hardware design will be designed using Vivado 2019.1 using the ZC702 development board.
From a top level perspective , the image processing pipeline involves sending data to the resize IP accelerator via the DMA and reading back data.
In essence we have a loop back setup between the DMA and PS DDR memroy with the accelerator in the middle.
The DMA has to be configured with a read and a write channel.
One important parts is that PYNQ as of early 2020 does not allow un-aligned transfers.
The resize IP needs to be added to the IP folder and the IP folder needs to be added to IP integrator path so that Vivado can find it.
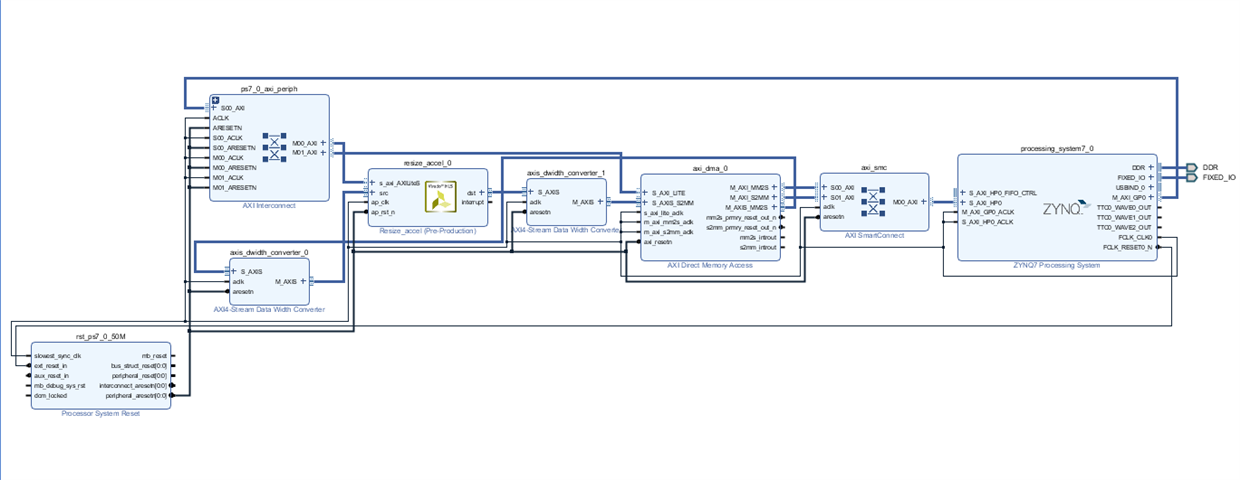
The image below shows the hardware design. It basically consists of a DMA loop-back with the the resize IP tucked in between.
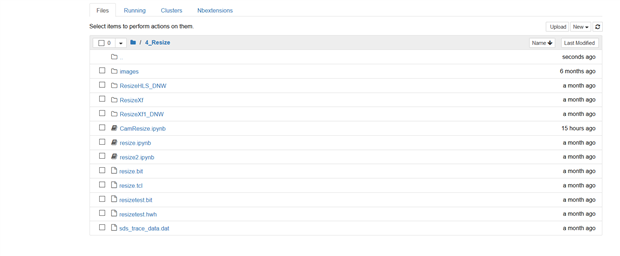
Now that the Vivado HW design is completed the next step is to compile the design and export:
a) The bitstream
b) the tcl file
c) the .hwh file.
The above two files are located under: PROJECT.src/sources_1/bd/design_name/hw_handoff.
Create a folder called PYNQ under the Vivado project folder and copy the two files above (.tcl and .hwh).
Then export the bitstream by going to File->Export-> Export Bitstream.
This completes the hardware design stage once all three files have been exported.
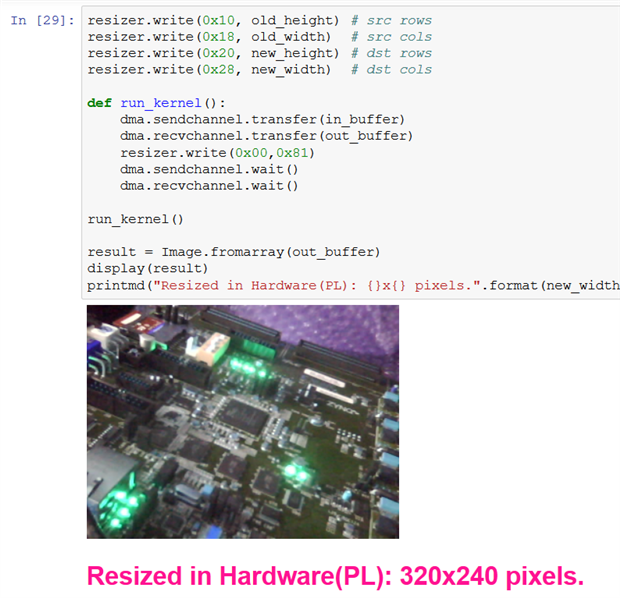
Python Notebook app
Moving on to the software part . We will use the resize IP software example and modify it to read the USB camera frames.
We will leverage the PYNQ framework to do the heavy lifting for the data movers.
The Resize IP has an AXI stream slave and master interface for input and output respectively. In addition it also has an AXI lite interface for configuring the core.
-

nashra
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

nashra
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children