


Previous posts
Post 2 - Installing OpenCV - Prerequisites
Post 5 - Installing eye tracker
Post 7 - SPI communication in Python
EyePrints - Post 8 - Getting started with Kinetis
EyePrints - Post 9 - Mechanical design
EyePrints - Post 10 - Mechanical design: the plotter
EyePrints - Post 11 - Eye tracker software
EyePrints - Post 12 - Getting started with the kit
EyePrints - Post 13 - KDS Project
EyePrints - Post 14 - The drawing board
In this post, I will show some pictures and video of the plotter
The plotter has a servo that can lift the pencil when the painter wants to move to another area without drawing anything on the board
The servo is controlled by a small Python script
import RPi.GPIO as GPIO GPIO.setmode(GPIO.BOARD) GPIO.setup(11,GPIO.OUT) pwm=GPIO.PWM(11,50)
To put down the pencil, the start method of the pwm object is invoked
pwm.start(7) pwm.start(0)
To lift the pencil up, the start method of the pwm object is invoked with different values
pwm.start(5.5) pwm.start(0)
Both values (7 and 5.5) has been determined empirically. The second invokation of the start method (pwm.start(0)) is required to "stop" the servo. The PWM signal generated by the Rapsberry Pi is not very stable, so the servo keeps on correcting its position. The pwm.start(0) function prevents the servo from moving continuously around its final position
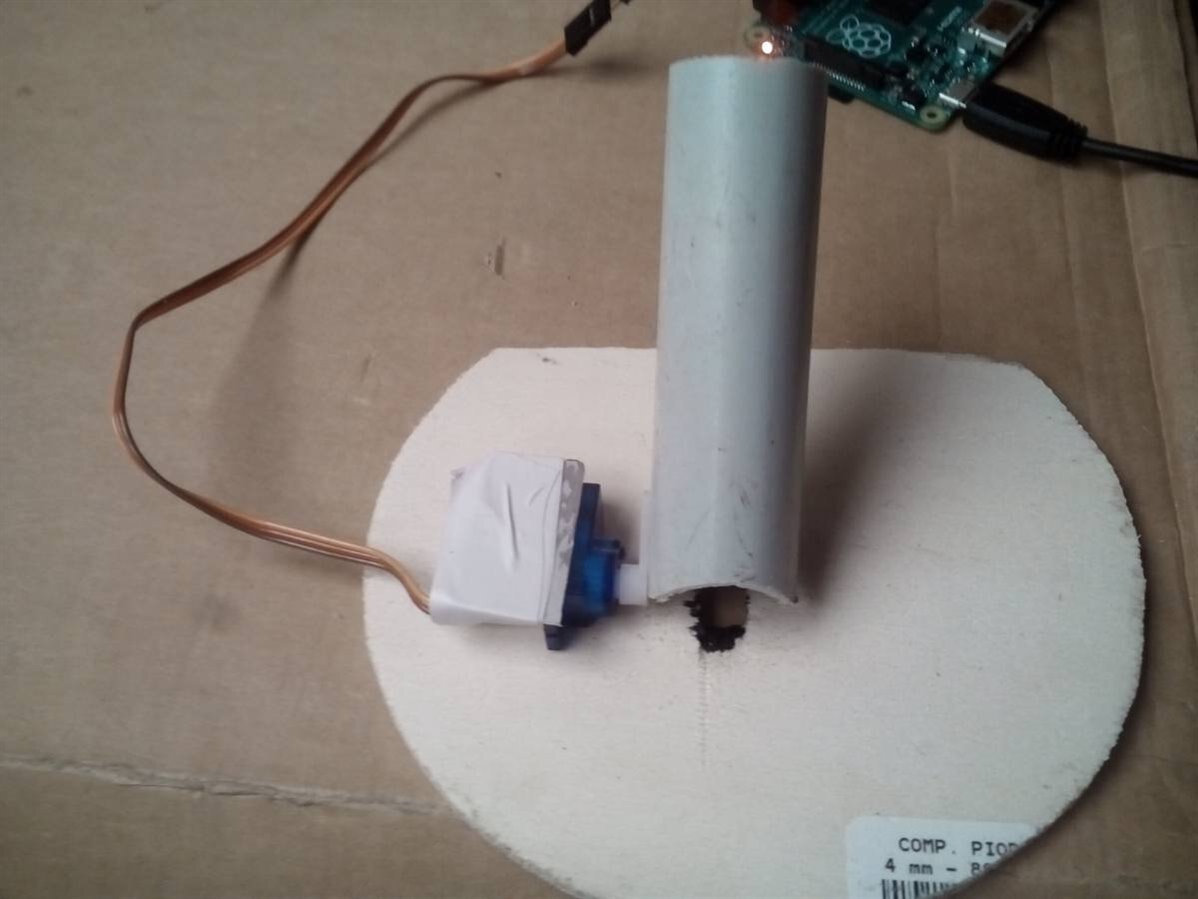
Here is the plotter with the pen in the "up" position

And here is the pen in "down" position

Finally, here is a video of the plotter in action

