The Sixth Sense Design Challenge had a mystery finisher prize which just arrived.It turned out to actually be 3 prizes, all very cool.There was an arduino MKR Zero which is a small but powerful MKR arduino with an ARM Cortex M0 and an SD card slot. T...
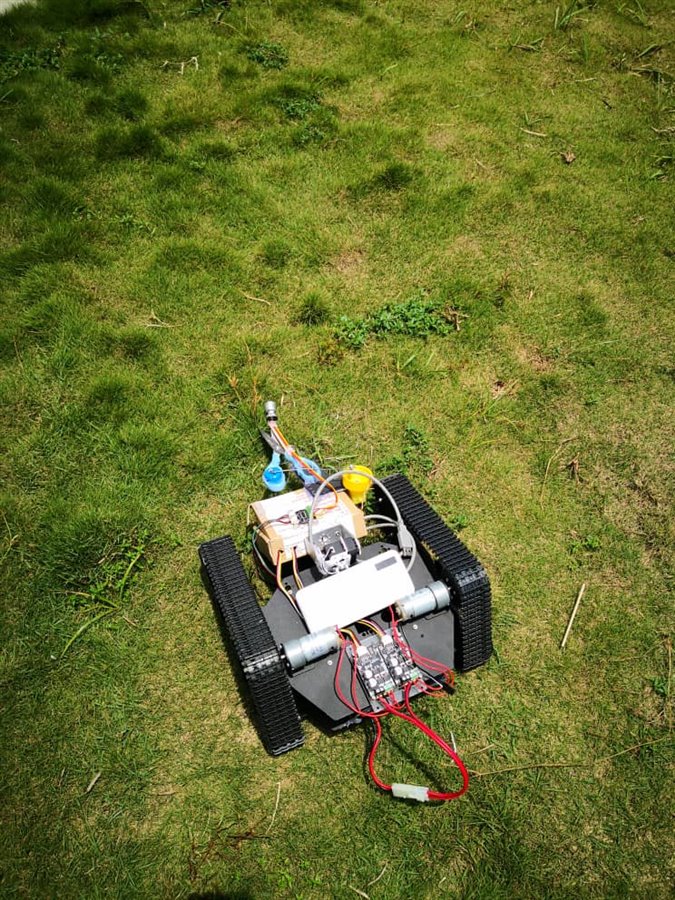
Really did a last minute rush to complete it, although very much scaled down in term of operation from what i originally envisionThe bot with power bank to power up the Nucleo, load cell and Hx711 based board that utilize the load cell FX1901the boar...
So we have been making slow but steady progress with our inspection system. Since this marks our completion of ten blog posts, we decided to do a brief review of what we have accomplished so far and all that is left to be done. We set out with the in...
GraffitiBot is a fully autonomous ground vehicle capable of printing graphics on the surface it is traversing.
This crude attempt artistic rendering at writing "E14" demonstrates what the GraffitiBot accomplished on the last day.
Update
The...
Well - it is the last day of this marathon design challenge and everything pretty much needs to go flawlessly to produce actual graffiti. But of course a lot of things are not going right. All the subsystems have been tested and are working well, but...
My previous blog is kinda long, so i put the motor control outcome in this blog instead after verifying that the nucleo bot is producing PWM and DIR signal, i test it on the robot. The nucleo is powered up with the always on powerbank, whereas t...
NOTE: i actually forgotten about this #9 blog so only post it today, few weeks after i initially work on itmy blog 12 is the coding sequel to this IntroductionThere are multiple IDEs that can be used with the Nucleo-64 STM32F411 Today, i tr...
The GraffitiBot is now fully functional for printing graffiti although there is still a lot of room for improvement of the print head nozzles. It took quite a bit of work to get the hoses to curl properly without kinking. The kinks were making ...
Due to really lack of time, rush out this simple motorized scissorfirst, i cut out a L shaped holder from old table calendar cardboard. it is hard enough and easier to work withAfter that, i glue the scissor to the L-shape holder. well i could have a...
We used iNav for the purpose of flight planning. This blog post is a summary of what we learned about iNav, why we decided to use this and how we planned to implement it. Designed primarily for racing iNAv runs on the flight controller and helps...
time flies, and soon it is deadline for contest.today i am assembling the 'weapon' of the robot, the motorized scissor. First, i want to choose a suitable motor to drive the scissori dig from my collection and found this Tamiya motor set, and...
This is a big day - the GraffitiBot made its maiden voyage!www.youtube.com/watchThis was just the first attempt at programming an autonomous route that would test the steering and the main drive.It is literally a dry run, there are no pumps or even r...
I have finally managed to wire up the motor controllers to the MCU. Here is a video showing what it looks like:www.youtube.com/watchNext I will try to program the MCU to run the steering and drive motors in a simple autonomous route.There is nothing ...
In January, we decided to make our own Flight Controller, with the objective that it to be easier to tweak and customize it. However, we came to a standstill because of a few bugs in the code and compatibility issues. We tried to make an Arduino base...
While one part of the team was busy working on assembling the drone and customizing the code for the FC, another part of the team was brainstorming on how the drone could be made more robust, with our initial objective in mind: to use drones for tunn...
This post is written to give a step-by-step description of how we will be implementing IR sensors and thermal imaging in our project. The potential uses for infrared sensors, especially in cameras, are vast and include search and rescue, survei...
Recently we have been working on the STM-32 Nucleo 64 development board. Firstly, we tried to use it as our Flight Controller replacing our older Flight Controller that was purely Arduino based. There were various reasons for our inclination towards ...
Another eventful week - most of it spent in Washington, has made the rest of the week ultra busy. The challenge deadline is looming and the mechanical design really needs to get done so I can start wiring everything up. The design of the front end an...
If you’re following our previous posts, you might know that we are trying to implement Computer Vision in our Drone Inspection System. Although we have a model ready and trained, there is an issue with the credibility of the same. The model is traine...
The PTF Series PTFM101C1G0PTFM101C1G0 RTD from TE Connectivity is a platinum RTD making it very stable and accurate and it is tiny as shown in a previous blog, allowing it to respond quickly to temperature changes. Although the Nucleo MCUNucleo MCU h...
This update explains how my pump controller circuit card was modified to allow it to control the steering motor and the main drive motor.The steering motor needs to be able to reverse, so the unipolar outputs needed to be altered to work as an H-brid...
As i was testing nucleo64 in mbed notice that some arduino pin convention needs to be changedfor example, the pinMode in arduino need to be updatedpinMode(_pin1, OUTPUT) ---> reconfigured as DigitalOuti am wondering if there is any tutorial ...





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}