


I'm not quite sure when I bought the Furby but I do remember the Furby Autopsy website inspiring the purchase. So that suggests it was perhaps after 1998.

When I recently checked there are some others that have also done some investigations including puppeteers and universities. A big thanks to Kelly Heaton for giving me permission to re-use her image showing the key parts of the Furby. As you can see there are loads of switches and sensors all over the Furby, there are also lots of moving parts but those are all run from a motor and cam mechanism.
| Furby Anatomy |
|---|
Furby Anatomy: From Kelly Heaton - anatomy of the furby |
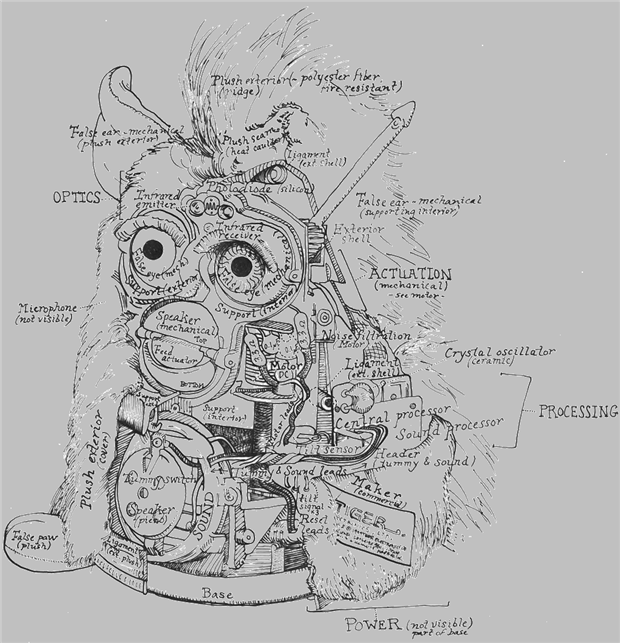
All I can say are that the original designers from Tiger Electronics were absolute wizards. They also did not skimp on construction with all the key components being attached via plugs and sockets. The "brains" of the operation are 2 boards with black blobs, it looks like one is a controller and the other is for processing the sounds. There is also an Eprom, Microphone and pre-amp and IR communications.

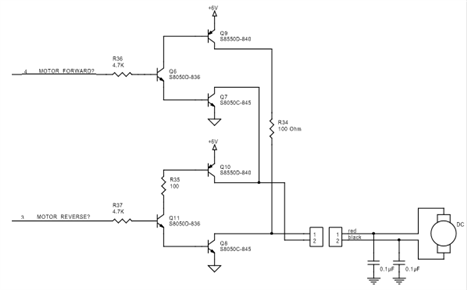
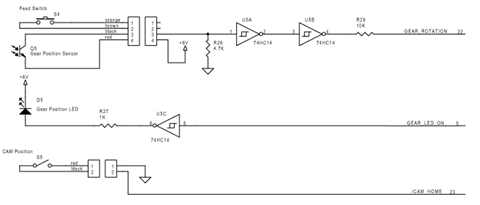
Schematics created by Chris Brown.
The motor seems to be controlled by a transistor based H-Bridge to the one I found in the RC car, so I think that I'll be swapping that out with a module again. To control the motor I also need to be able to count the pulses from the optical sensor and monitor the home switch. I think there's a couple of errors around this part of the schematics, the H-Bridge seems lopsided and the sensors on the gear position seem to be reverse. However they have saved me a whole load of work and I should be able to hook in my circuits to the connectors where I'll be removing the controller and sound chips.
Equally helpful, the team at Northwestern University Mechatronics Design Laboratory have mapped out the Encoder Pulses for the different kinds of motion.
Number of pulses relative to the home position
Pose of the Furby
0 to 30
ears up, eyes open, mouth closed, not tilted
30 to 60
ears down, eyes open, mouth open, not tilted
60 to 100
ears down, eyes open, mouth shut, not tilted
100 to 130
ears down, eyes shut, mouth shut, tilted
130 to 170
ears up, eyes shut, mouth open, not tilted
170 to 200
ears up, eyes open, mouth open, not tilted
Note:
The encoder generates about 200 pulses per revolution of the motor and the number of pulses goes back to 0 again after one complete revolution.
The motion of the Furby is continuous and there the poses described above are just approximations. In many cases, the eyes or ears are partly open or closed.
By looking at the mapping above, however, you can have a rough idea of which number of pulses corresponds to which pose.
The comment "The motion of the Furby is continuous" does seem to tally with my experiments on the drive motor h-bridge which suggest that the motor does not have a stopped option. As per the maindrive my plan is to use a TB6612FNG module for the Furby motor, I'll use transistors to turn on and off the signals to the module.
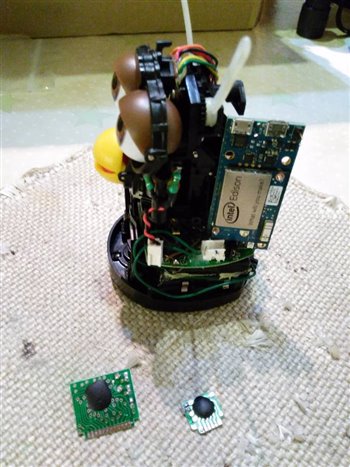
Inside the Furby
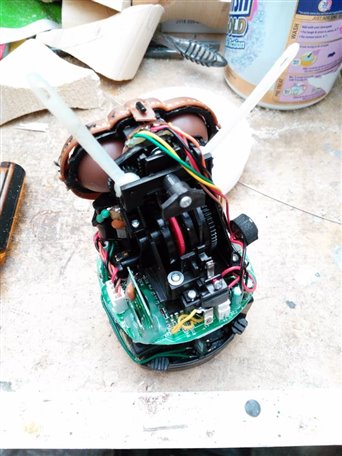
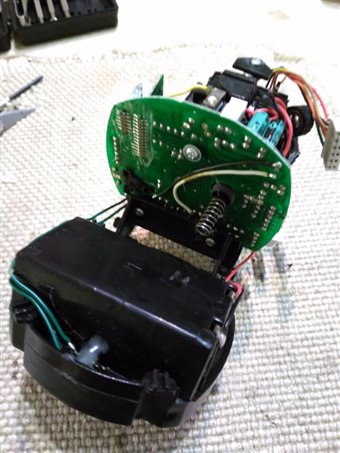
I removed the casing and the speaker assembly and that allowed access to the PCB. I disconnected all of the sockets and extracted the board. Using some desolder braid I carefully removed the two "COB" (chip on blob?) boards. I wanted to keep the main PCB operational as that had signal conditioning and a driver for the opto-sensor for the main drive motor.
| {gallery} Inside the Furby |
|---|
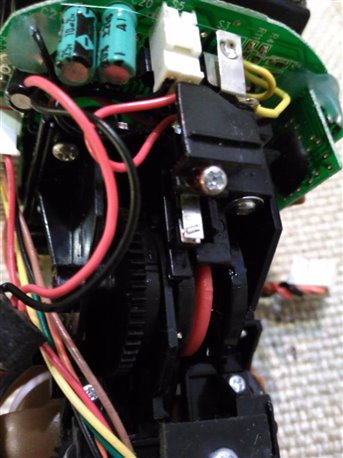
Furby Guts: Inside the back of the Furby |
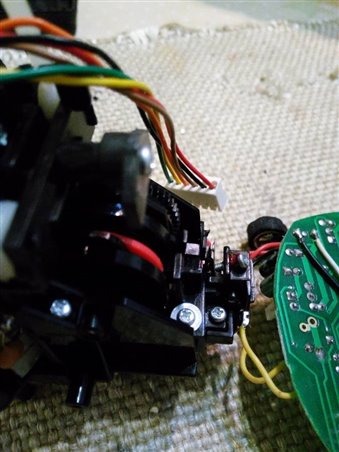
Mechanics: Main drive gear and cams to activate the movements |
Situp Plunger: This plunger causes the Furby to tilt forward |
Homing Switch: These contacts are closed once per rotation |
PCB: Note the after production modifications, LED for the optical sensor top left, the 2 daughter boards for control and sound, and the black circle bottom left is the tilt switch |
PCB underside: The black and white wires connect up the power connection |
Battery Compartment: Looking at the battery compartment as a place to put the Edison and a battery |
Brain removal: With the two daughter boards removed there might be space for the Edison in the main housing |
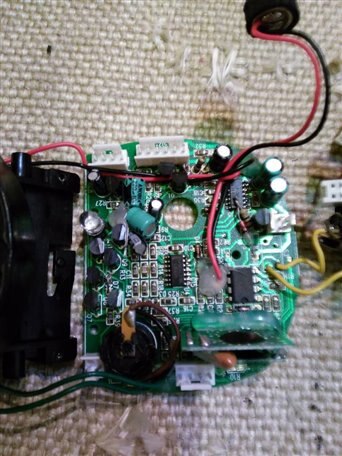


I wanted to understand the optical sensor as that would be needed to determine the positions for the animations. I realised that the LED on the PCB sticks into a tube and the sensor must be at the other end of that. There's some Schmitt triggers on the output of the photo transistor so we should get a clean signal from that.
As per the car, I also wanted to check that the motor was running and the mechanism was working, so I hooked up the motor directly to a 5v USB from a powerbank. The circuit diagram has this running from 6v so I wanted to be sure it would run correctly from 5v, which it does.
The next thing to do for the Furby is to hook up a H-Bridge and the two sensors to the Edison to check it can be controlled. Some of the other furby hackers have reported problems with the signal from the optical sensor.
Reference
Northwestern University - Mechatronics - Furby Dissection
Previous Posts
[Upcycle It] Interactive Race Car Driver - Plan of action
[Upcycle It] Interactive Race Car Driver - Software
[Upcycle It] Interactive Race Car Driver - Lights
[Upcycle It] Interactive Race Car Driver - Detailed Plan
[Upcycle It] Interactive Race Car Driver - Edison
[Upcycle It] Interactive Race Car Driver - Drive Motor Testing
Top Comments