


Previous posts
Post 2 - Installing OpenCV - Prerequisites
Post 5 - Installing eye tracker
Post 7 - SPI communication in Python
EyePrints - Post 8 - Getting started with Kinetis
EyePrints - Post 9 - Mechanical design
EyePrints - Post 10 - Mechanical design: the plotter
EyePrints - Post 11 - Eye tracker software
EyePrints - Post 12 - Getting started with the kit
EyePrints - Post 13 - KDS Project
EyePrints - Post 14 - The drawing board
EyePrints - Post 15 - The plotter
EyePrints - Post 16 - The unhappy end
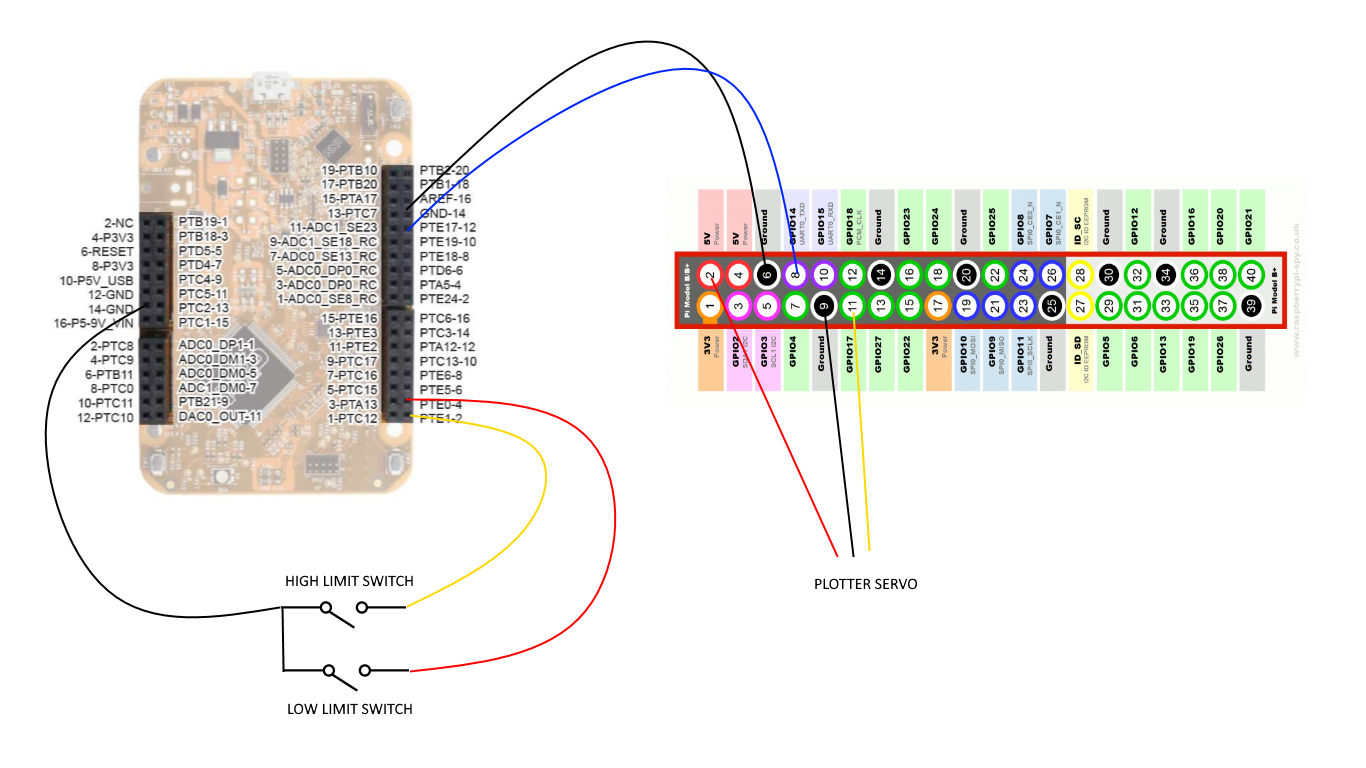
In this post, I will pack up everything I built and developed during this challenge. First of all, here is the wiring between the Freedom Board and the Raspberry Pi
This is the webcam mounted on a baseball cap


Before using the tracker, a calibration is required
Now, EyePrints can run!
Final considerations
I never used the Freedom board, but I really appreciated the quality of the board, the number of peripherals available (including the accelerometer), the easyness of use of the IDE and the completeness of the examples.
The motor controller board I think is a bit less mature than the Freedom board. There are some useful tools that calculated the parameters for the control algorithm, but it's not easy to add your custom to the generated project. Probably a cleaner project structure would include fewer code in the main function. Also, some comments like "Add your code here" would help users
Provided control algorithms seem to work very well. I tested the sensorless speed control, and the motor speed is quite constant with smooth ramps
The only disappointing thing is that the challenger's kit components had a very limited availability. This prevents me from completing the project. However, the eyetracker proved to be enough precise and not so difficult to get accustomed to. Strange to say, bu the webcam in front of your eyes is almost "invisible", in that it does not interfere with your sight. So, should the motor controller and the motor itself have been available on time, I'm quite confident I would have been able successfully complete this project
Top Comments