


I'm road testing the Ultra-Low Power Arm Cortex-M4 Darwin MCU EVM. In these blog posts I try to build a real world low power design. A barometer using the pressure sensor BM1383AGLV BM1383AGLV from the Rohm SensorShield-EVK-003 (Arduino Compatible) kit.
In this part, the project is functional .But not yet using power save options.
|
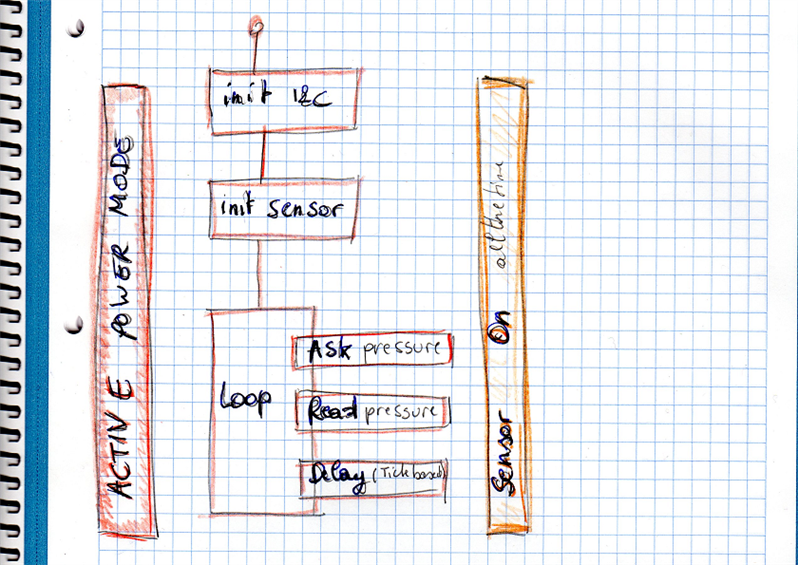
Barometer Firmware Flow
This is a straightforward design.
- processor in active mode, peripherals on
- !2c initialised
- sensor initialised
- a loop that
- polls the sensors and retrieves the data
- waits 500 ms
The firmware also logs info to the console over USB, but I deactivate these functions before making any power measurements.
This code (all printf() ) is just used during the development cycle.
Power Profile
As you can see above, the processor runs in the most power expensive mode. All the time.
I won't go over the options available to save power. That's for a next post. Just review where the inefficiencies are:
- We always run in active mode.
- all modules are turned on, also the ones that we don't use. Same for RAM.
- We're using the maximum frequency of the microcontroller
- in the loop - where the program spends virtually all of its active life - most of the time is spent waiting, with the heating on
 .
.
the loop is approx 500 ms (a delay of 500, and a few ms to exchange data with the sensor) - sensor is powered all the time.
- sensor is in active mode all the time, even though we know that it can start up and initialise in say 4 ms and deliver new data in 2 ms.

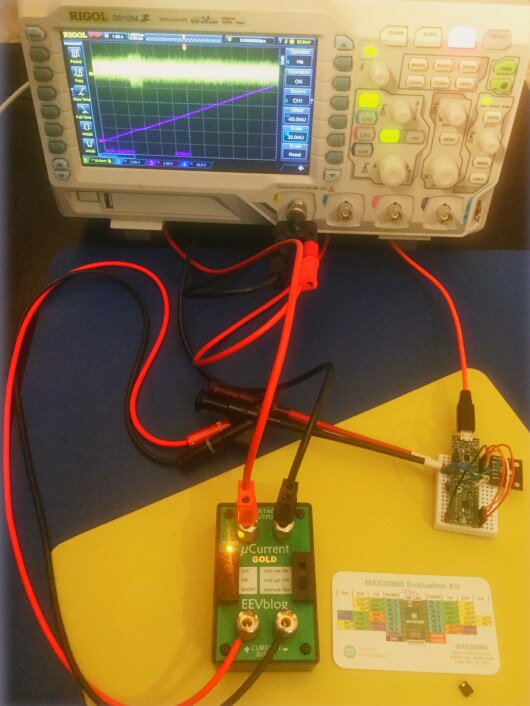
Measure the Consumption
I'm using my oscilloscope's integration function to get the power over a significant time.
I'll redo this exercise whenever I (think I will) make a significant power save step in future posts.
Current is converted by a µCurrent. 1 mV represents 1 mA. Power source is 1.8 V.
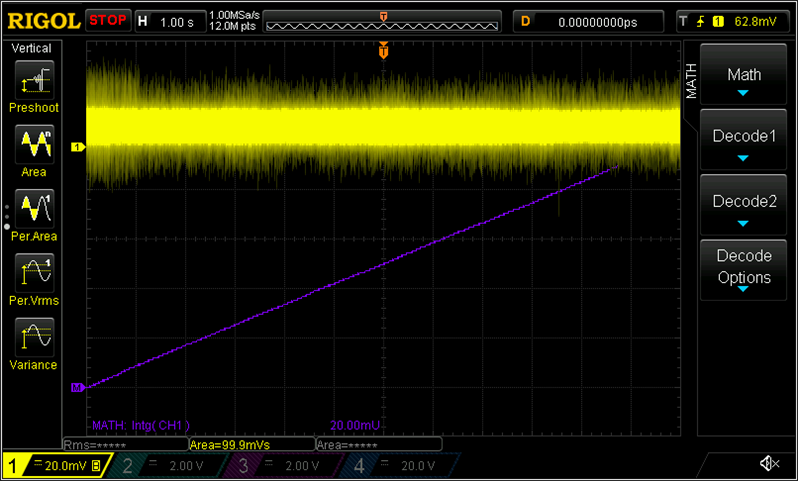
The time base is 1 second per division. Total 12 seconds. We capture 23 and a bit loops of the controller.
The A signal is set to 20 mv / division
Math is set to integral of channel A; 20 mUnits / division.
I've also used a measure to calculate the area under A. That should give the same result as the math signal at the end of the X scale.
I've redrawn the integral by hand for clarity (I haven't found a way to give the math channel focus on my scope).
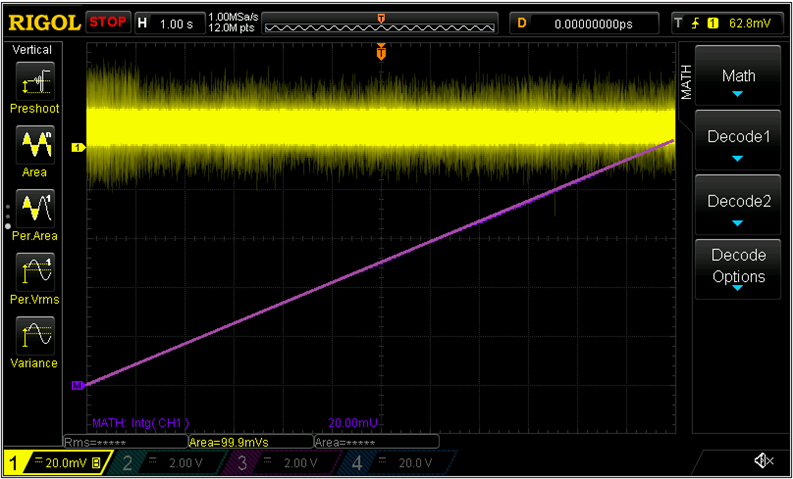
Measure says I consumed 100 mVs. The math function shows just a tad over 5 divisions, 100 mUnits.
This is measured with the device in continuous mode, so the startup power is ignored. That's on purpose.
Now that I know that I've burned 100 mVs, measured over 12 seconds, I have a reference for the optimisation exercise.
Multiply by 1.8 V then divide by a magic number to know the amphours.
disclaimer: I haven't validated this. Maybe my reasoning is off and the measure vs math values seem to match by accident. I'd trust the math's integral value more.
But then I have to look up in the manual what 20 mU means, in relation to the settings of channel A.
If you know, tell me.
The Eclipse project with sources, for this phase of the experiment, is attached.
Top Comments