


Hi! Welcome to our 12th blog post. This would be the final blog post, which will talk about putting it all together to form a harmonious system.
The whole idea behind making this project (and this challenge) was to create an idea which would have some real-world weight for people less fortunate than us. We wanted to build a project which was capable of bringing at least a tiny bit of convenience for those people, and today we're proud to say that we've reached to the end with a device that can do that.
The world is full of so many visually appealing scenes and events. It's a shame that some people are blocked out from this beauty of nature, for no fault of their own. While our device may not come close to fully convey the elegant nature of visual reality to these people, we think this is one small step in the right direction.
Two months ago, we published our 1st blog post. We had an idea planned out then, which was this:
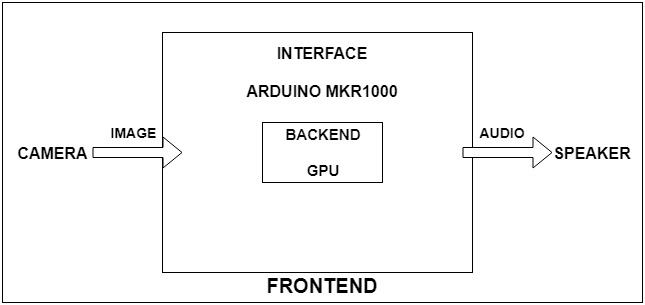
Today, we're happy that this system has finally come to fruition. The device, centered around the powerful MKR1000, is small, lightweight and user-friendly. All the user has to do is connect it to a portable power source, and it will automatically start periodically describing the surroundings to the person.
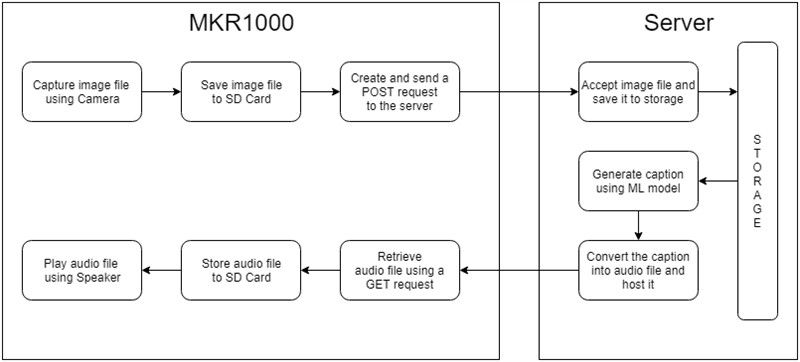
The following block diagram is a bit more refined, and captures the working rather nicely:
Here's the list of components that went into this project:
Components | Cost (USD) |
|---|---|
| Arduino MKR1000 | 34.99 |
| ArduCAM Mini OV2640 2MP | 25.99 |
| PAM 8403 Amplifier | 1.00 |
Speaker (4 Ohms, 3 Watts) | 3.00 |
| SD Card and SD Proto Shield | |
| Total | 64.98 |
The server code was written in Python 3.6.2, using the Flask web microframework. The model used for captioning was the Show and Tell model. Audio files were generated from the captions using a TTS library.
The Arduino sketches were naturally written, compiled and uploaded via the Arduino IDE.
Final connection diagram -

Here's the finished prototype:

Our plans for the future are to:
- Remove breadboard dependency, make it low-profile
- Shift to earphones (Speaker is just for demonstration purpose, can be replaced with earphones)
Here's a little video we made of our creation in action, it was a bit tough to get more samples from outside but it works in the same way as shown in earlier samples. All you have to do is take pictures from the camera and the .wav file of its captions are produced in the same way.
The image that it works on -

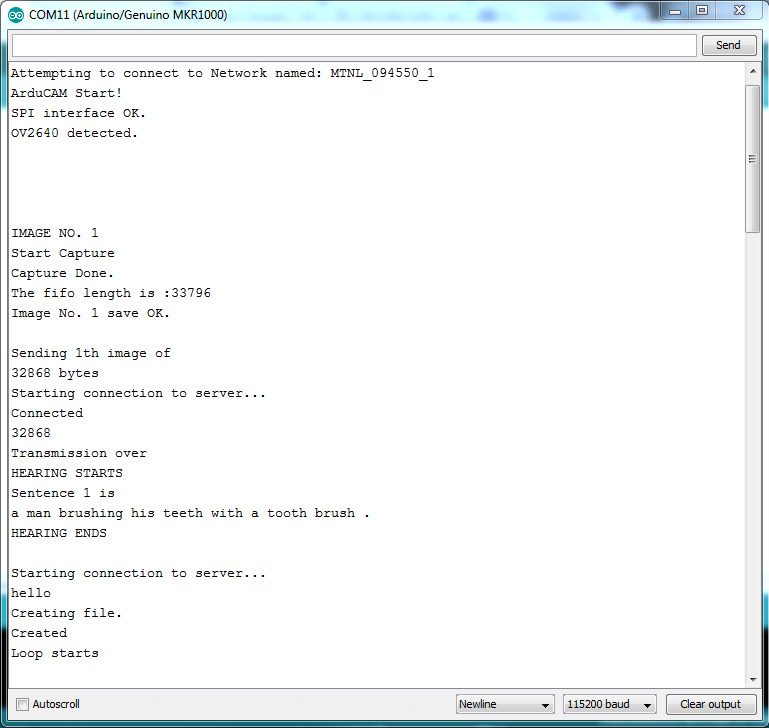
This is how it looks on the serial monitor -

For other examples like -

The audio produced is -
Now for this image,

The generated audio caption for this image is -
This is our Arduino sketch (which took only 20% of the MKR's memory):
#include <SPI.h>
#include <WiFi101.h>
#include<SD.h>
#include <ArduCAM.h>
#include <Wire.h>
#include <AudioZero.h>
#include "memorysaver.h"
int n=1;
File myFile;
File theFile;
//#include "arduino_secrets.h"
boolean currentLineIsBlank = true;
#define SD_CS 4
const int SPI_CS = 0;
ArduCAM myCAM( OV2640, SPI_CS );
char ssid[]="MTNL_094550_1";
char pass[]="pranjal299";
int keyIndex=0;
WiFiClient client;
int status=WL_IDLE_STATUS;
WiFiServer server(80);
void setup() {
Serial.begin(115200);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.print("Initializing SD card...");
if (!SD.begin(4)) {
Serial.println("initialization failed!");
//return;
}
Serial.println("initialization done.");
if(WiFi.status()==WL_NO_SHIELD) {
Serial.println("WiFi shield not present");
while(true);
}
while(status!=WL_CONNECTED) {
Serial.print("Attempting to connect to Network named: ");
Serial.println(ssid);
status=WiFi.begin(ssid,pass);
delay(3000);
}
server.begin();
cam_setup();
Serial.println("");
Serial.println("");
}
void img_POST() {
Serial.begin(115200);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.println("");
//Load Normal Picture
while (SD.begin(4));
String normalFilename = String(n)+".JPG";
File normPicture = SD.open(normalFilename);
// Get the size of the image (frame) taken
while (!normPicture.available());
long jpglen = normPicture.size();
Serial.println("Sending "+String(n)+"th image of");
Serial.print(jpglen, DEC);
Serial.println(" bytes");
// Prepare request
String start_request = "";
String end_request = "";
start_request = start_request + "\n" + "--AaB03x" + "\n" + "Content-Type: image/jpeg" + "\n" + "Content-Disposition: form-data; name=\"file\"; filename=\"" + normalFilename + "\"" + "\n" + "Content-Transfer-Encoding: binary" + "\n" + "\n";
end_request = end_request + "\n" + "--AaB03x--" + "\n";
long extra_length;
extra_length = start_request.length() + end_request.length();
//Serial.println("Extra length:");
//Serial.println(extra_length);
long len = jpglen + extra_length;
//Serial.println(start_request);
Serial.println("Starting connection to server...");
char flask_hostname[]="192.168.1.109";
// Connect to the server, please change your IP address !
if (client.connect(flask_hostname, 5000)) {
Serial.println("Connected");
client.print("POST ");
client.print("/");
client.println(" HTTP/1.1");
client.println("Host: " + String(flask_hostname));
client.println("Content-Type: multipart/form-data; boundary=AaB03x");
client.print("Content-Length: ");
client.println(len);
client.print(start_request);
//Serial.println("Connected1");
if (normPicture) {
//Serial.println("Connected2");
int count = 0;
byte clientBuf[128];
int clientCount = 0;
while (normPicture.available()) {
clientBuf[clientCount] = normPicture.read();
clientCount++;
count++;
if (clientCount > 127) {
//Serial.println(".");
client.write(clientBuf, 128);
clientCount = 0;
}
}
if (clientCount > 0) client.write(clientBuf, clientCount);
Serial.println(String(count));
normPicture.close();
}
//Serial.println("Connected3");
client.print(end_request);
client.println();
Serial.println("Transmission over");
}
else {
Serial.println("Connection failed");
}
char sentence[100];
Serial.println("HEARING STARTS");
Serial.println("Sentence "+String(n)+" is ");
while (client.connected()) {
int flag=0;
int i=0;
while (client.available()) {
// Read answer
char c = client.read();
if(c=='$')
{
flag=flag+1;
//Serial.println(flag);
//Serial.println(c);
continue;
}
if(flag==1)
{
Serial.print(c);
//sentence[i]=c;
//i=i+1;
//Serial.print(c);
}
//Serial.print(c);
}
}
//Serial.println("Sentence "+String(n)+" is ");
//Serial.println(sentence);
Serial.println("");
Serial.println("HEARING ENDS");
delay(100);
client.stop();
//while(true);
}
void wav_GET()
{ Serial.println("");
Serial.println("Starting connection to server...");
char flask_hostname[]="192.168.1.109";
// Connect to the server, please change your IP address !
if (client.connect(flask_hostname, 5000)) {
Serial.println("hello");
client.println("GET /output"+String(n)+".wav HTTP/1.1"); // change resource to get here
client.println("Host: 192.168.1.109"); // change resource host here
client.println("Connection: close");
client.println();}
else{
Serial.println("Connection failed");
}
Serial.println("Creating file.");
theFile = SD.open("output"+String(n)+".wav", FILE_WRITE); // change file name to write to here
if (!theFile) {
Serial.println("Could not create file");
while (1);
}
Serial.println("Created");
int x=1;
Serial.println("Loop starts");
while(x!=0)
{
if (client.available()) {
char c = client.read();
//Serial.println("Available");
if (c == '\n' && currentLineIsBlank) {
// end of HTTP header, now save requested file
while (client.connected()) {
// stay in this loop until the file has been received
if (client.available()) {
c = client.read(); // get file byte
theFile.print(c); // save file byte
//Serial.println("reading");
}
}
}
// detect the end of the incoming HTTP header
if (c == '\n') {
// starting a new line
currentLineIsBlank = true;
}
else if (c != '\r') {
// got a character on the current line
currentLineIsBlank = false;
}
}
// if the server's disconnected, stop the client:
if (!client.connected()) {
Serial.println();
Serial.println("disconnecting.");
client.stop();
theFile.close();
Serial.println("Finished writing to file");
// do nothing forevermore:
//while (true);
x=0;
}
}
Serial.println("loop ends");
}
void loop() {
for(int i=1;i<6;i++)
{
cam_2_SD();
delay(200);
img_POST();
delay(200);
wav_GET();
delay(200);
play_WAV();
n=n+1;
delay(1000);
}
while(true);
}
void cam_setup()
{
uint8_t vid, pid;
uint8_t temp;
Wire.begin();
Serial.begin(9600);
while (!Serial) {
; // wait for serial port to connect. Needed for native USB port only
}
Serial.println(F("ArduCAM Start!"));
//set the CS as an output:
pinMode(SPI_CS,OUTPUT);
digitalWrite(SPI_CS, HIGH);
// initialize SPI:
SPI.begin();
//delay(2000);
//Reset the CPLD
myCAM.write_reg(0x07, 0x80);
delay(100);
myCAM.write_reg(0x07, 0x00);
delay(100);
while(1){
//Check if the ArduCAM SPI bus is OK
myCAM.write_reg(ARDUCHIP_TEST1, 0x55);
temp = myCAM.read_reg(ARDUCHIP_TEST1);
if (temp != 0x55){
Serial.println(F("SPI interface Error!"));
delay(1000);continue;
}
else{
Serial.println(F("SPI interface OK."));break;
}
}
while(1){
//Check if the camera module type is OV2640
myCAM.wrSensorReg8_8(0xff, 0x01);
myCAM.rdSensorReg8_8(OV2640_CHIPID_HIGH, &vid);
myCAM.rdSensorReg8_8(OV2640_CHIPID_LOW, &pid);
if ((vid != 0x26 ) && (( pid != 0x41 ) || ( pid != 0x42 ))){
Serial.println(F("Can't find OV2640 module!"));
delay(1000);continue;
}
else{
Serial.println(F("OV2640 detected."));break;
}
}
myCAM.set_format(JPEG);
myCAM.InitCAM();
myCAM.OV2640_set_JPEG_size(OV2640_1024x768);
delay(1000);
}
void cam_2_SD(){
Serial.println("");
Serial.println("");
Serial.println("IMAGE NO. "+String(n));
char str[8];
byte buf[256];
static int i = 0;
static int k = 0;
uint8_t temp = 0,temp_last=0;
uint32_t length = 0;
bool is_header = false;
File outFile;
//Flush the FIFO
myCAM.flush_fifo();
//Clear the capture done flag
myCAM.clear_fifo_flag();
//Start capture
myCAM.start_capture();
Serial.println(("Start Capture"));
while(!myCAM.get_bit(ARDUCHIP_TRIG , CAP_DONE_MASK));
Serial.println(("Capture Done."));
length = myCAM.read_fifo_length();
Serial.print(("The fifo length is :"));
Serial.println(length, DEC);
if (length >= MAX_FIFO_SIZE) //384K
{
Serial.println(("Over size."));
return ;
}
if (length == 0 ) //0 kb
{
Serial.println(("Size is 0."));
return ;
}
//Construct a file name
//k = k + 1;
//itoa(k, str, 10);
//strcat(str, ".jpg");
//Open the new file
outFile = SD.open(String(n)+".JPG", O_WRITE | O_CREAT | O_TRUNC);
if(!outFile){
Serial.println(("File open failed"));
return;
}
myCAM.CS_LOW();
myCAM.set_fifo_burst();
while ( length-- )
{
temp_last = temp;
temp = SPI.transfer(0x00);
//Read JPEG data from FIFO
if ( (temp == 0xD9) && (temp_last == 0xFF) ) //If find the end ,break while,
{
buf[i++] = temp; //save the last 0XD9
//Write the remain bytes in the buffer
myCAM.CS_HIGH();
outFile.write(buf, i);
//Close the file
outFile.close();
Serial.println(("Image No. "+String(n)+" save OK."));
is_header = false;
i = 0;
}
if (is_header == true)
{
//Write image data to buffer if not full
if (i < 256)
buf[i++] = temp;
else
{
//Write 256 bytes image data to file
myCAM.CS_HIGH();
outFile.write(buf, 256);
i = 0;
buf[i++] = temp;
myCAM.CS_LOW();
myCAM.set_fifo_burst();
}
}
else if ((temp == 0xD8) & (temp_last == 0xFF))
{
is_header = true;
buf[i++] = temp_last;
buf[i++] = temp;
}
}
}
void play_WAV()
{ AudioZero.begin(44100);
File myFile = SD.open("output"+String(n)+".wav");
if (!myFile) {
// if the file didn't open, print an error and stop
Serial.println("error opening test.wav");
while (true);
}
Serial.print("Playing");
// until the file is not finished
AudioZero.play(myFile);
Serial.println("Finished playing");
delay(300);
}
Links to other blogs:
- Audio4Vision #01 - Introduction and Plan of Action
- Audio4Vision #02 - Initial research: ResNet as a starting point
- Audio4Vision #03 - SD card and WiFi setup in MKR1000
- Audio4Vision #04 - Show and Tell: Image Caption Generator Neural Network
- Audio4Vision #05 - Show and Tell: More Iterations and Finetuning
- Audio4Vision #06 - Initial prototyping with OV7670
- Audio4Vision #07 - The ArduCAM Mini OV2640 2MP and saving images to SD card
- Audio4Vision #08 - Deploying the Show and Tell model on a server
- Audio4Vision #09 - Interfacing Amplifier and Speaker with MKR1000
- Audio4Vision #10 - TTS: Text to Speech library
- Audio4Vision #11 - Arduino MKR1000, its code and HTTP methods
- Audio4Vision #12 - Putting it all together, wrap up and thanks!
Finally, we would like to thank Element14 and Arduino, for giving us the opportunity to break from the cookie-cutter education system and indulge in this extra-curricular creative exercise. We want to thank other challengers for providing a sense of friendly competition, and the mentors to keep us motivated, their suggestions were really valuable. We want to thank all those who have been following our blogs and we want to thank the programming gods for seeing us through this project
Hope this blog is considered in your judgment phase! Cheers!
Regards,
Pranjal Ranjan,
Sarvesh Patil,
Utkarsh Sharma
Top Comments