


Previous posts for this project:
- [AirCare] InTheAir - Project Description
- [AirCare] InTheAir - Week 1: Getting a Launchpad to Blink
- [AirCare] InTheAir - Week 2: Preparing the Beaglebone Black
- [AirCare] InTheAir - Week 3: Fuel Tank Testing
- [AirCare] InTheAir - Week 4: Using the CC3200
- [AirCare] InTheAir - Week 5: openHAB and MQTT
- [AirCare] InTheAir - Week 6: Accessing Fuel Tank's Data
- [AirCare] InTheAir - Week 7: Dust sensor
- [AirCare] InTheAir - Week 8: MSP430FR5969 with Energia14
- [AirCare] InTheAir - Week 11: CC3200, Energia and analogRead()
- [AirCare] InTheAir - Week 12: Automatically starting some things
- [AirCare] InTheAir - Week 13: GP2Y10 BoosterPack
- [AirCare] InTheAir - Week 14: Ordering Parts and PCBs
- [AirCare] InTheAir - Week 16: CNC Milling
- [AirCare] InTheAir - Week 16 bis: Fan Control with MSP430FR5969
- [AirCare] InTheAir - Week 17: Surface Mount Soldering
- [AirCare] InTheAir - Week 18: Finalizing Things
Introduction
This is it, the end of element14's In the Air Design Challenge. After 18 weeks of working on my project, I'm glad it's over  And even though I didn't create a spectacular solution, the journey has been an interesting one.
And even though I didn't create a spectacular solution, the journey has been an interesting one.
What I Learned
This has been a challenge full of new things for me:
- Launchpads
- Surface mount components and soldering
- Solar energy
- LiPo batteries
Launchpads
Launchpads. I haven't fallen in love with them just yet. Problems were encountered at the beginning of the project starting with the software (week 1), and during the challenge as well (week 11).
I might be biased, as I've mainly been using Arduinos until now. But for the projects I'm working on and the requirements I have, there hasn't been something I couldn't do more easily with them. With the time constraints and the stress of getting the project to work being over soon, I'll try to take the time and explore the Launchpads in a more relaxed way, hoping to discover their potential.
Surface Mount Components and Soldering
The only previous experience I had with surface mount components and soldering, was when I removed a tiny resistor on the Gizmo 2. That is also the reason why I didn't go straight for the more complex parts like the BQ25504 and other extremely small and complex components. Once I have mastered the basics, I'll move on to the more advanced components.
I enjoyed my first hot air soldering experience very much (week 17). Seeing the solder reflow and having the components move into place was fun to see.
Solar Energy
This is my first project using solar energy. And even though I used off the shelf components like the FuelTank Boosterpack (week 3), I ordered the components required to build my own charging circuit. This will however require more research on the subject and (a lot of) practice with surface mount soldering.
LiPo Batteries
Finally, with the FuelTank Boosterpack I also used LiPo batteries in a project for the first time. I immediately made the mistake of letting the battery discharge too much (week 6), a mistake I won't repeat any time soon. It is an interesting solution to make projects portable.
Conclusion
I came in contact with a lot of new technologies, and even if I do not (fully) master them yet, I consider it a personal achievement. Putting all frustrations aside, I'm glad I participated and got to learn all of this!
What I Made
Over the course of the challenge, I created two things:
- a central unit consolidating all collected sensor data
- a solar powered, wifi enabled, remote sensor
Central Unit
The central unit is based on the Beaglebone Black with a 7" BB View LCD touchscreen (week 2) running openHAB (week 5). The Beaglebone Black is connected to the MSP430FR5969 (week 16b) using their UART interfaces. The MSP430 is in charge of the timing critical task of sending signals over RF (433MHz) to power sockets in order to turn individual filtering systems on or off. The data received by the control unit is categorised, interpreted and trended over time.
A custom enclosure was built to house the LCD touchscreen, Beaglebone Black and MSP430FR5969 with RF transmitter (week 16).
| {gallery:autoplay=false} Control Unit |
|---|
Enclosure: the control units enclosure assembled and painted |
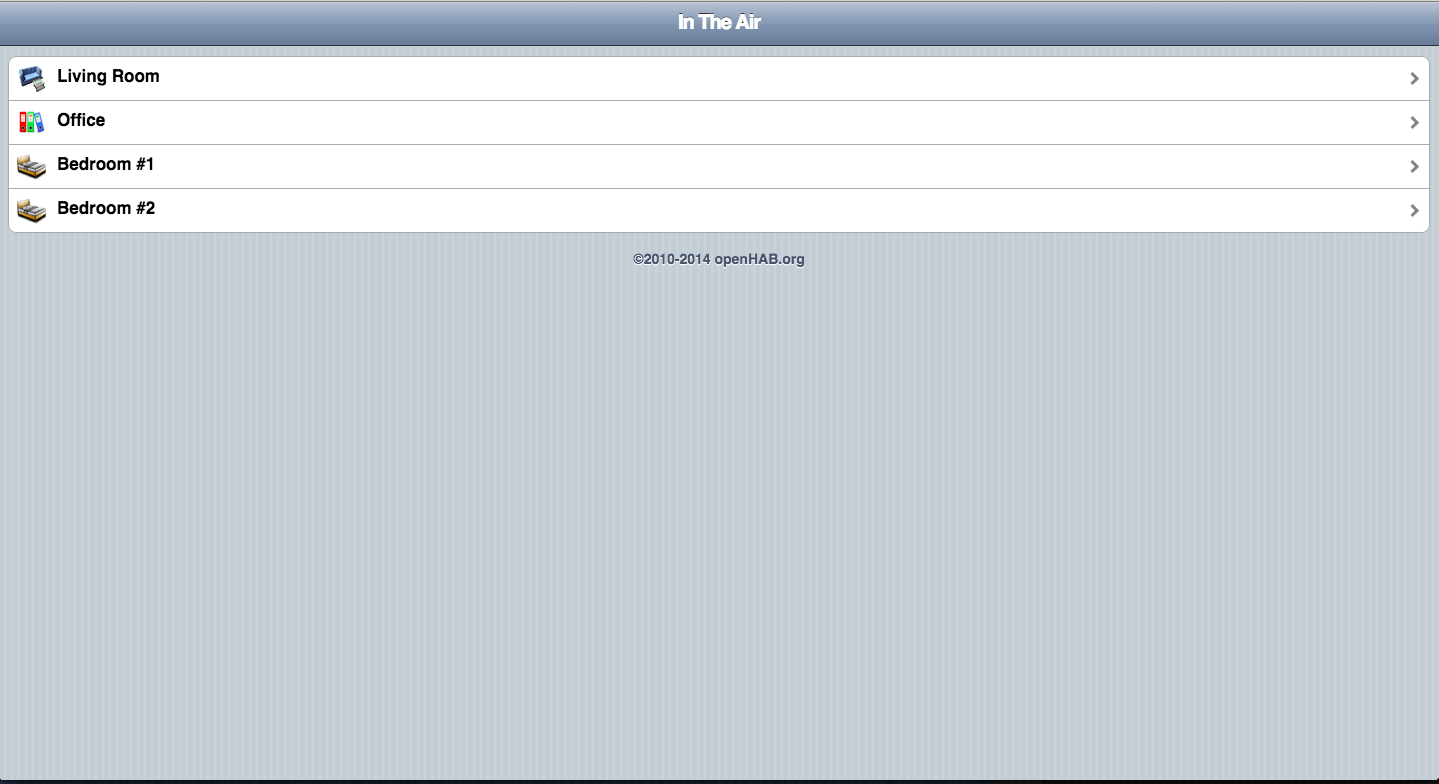
Home: the landing page of the application, providing an overview of the monitored rooms |
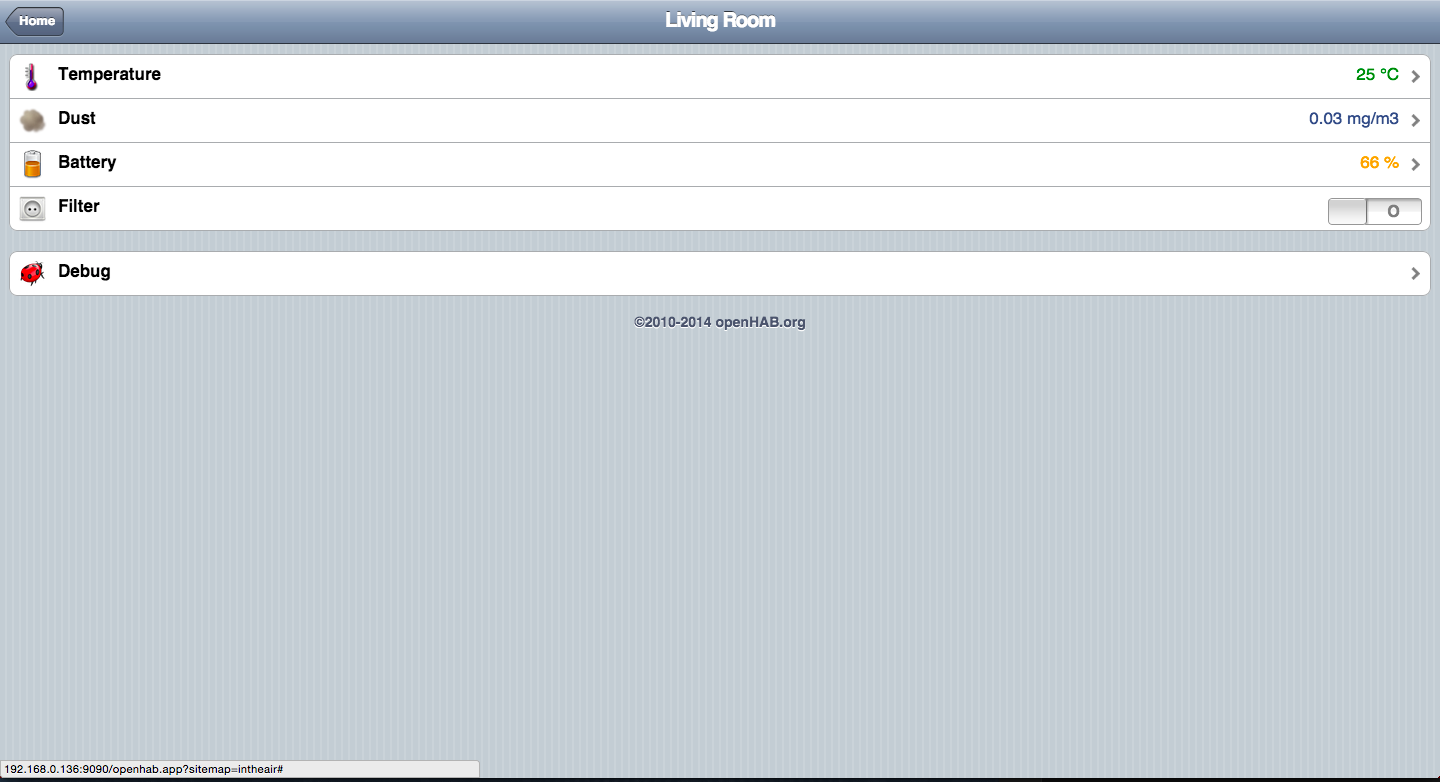
Data Collection: collected data available per room, with a debug menu providing more detailed information |
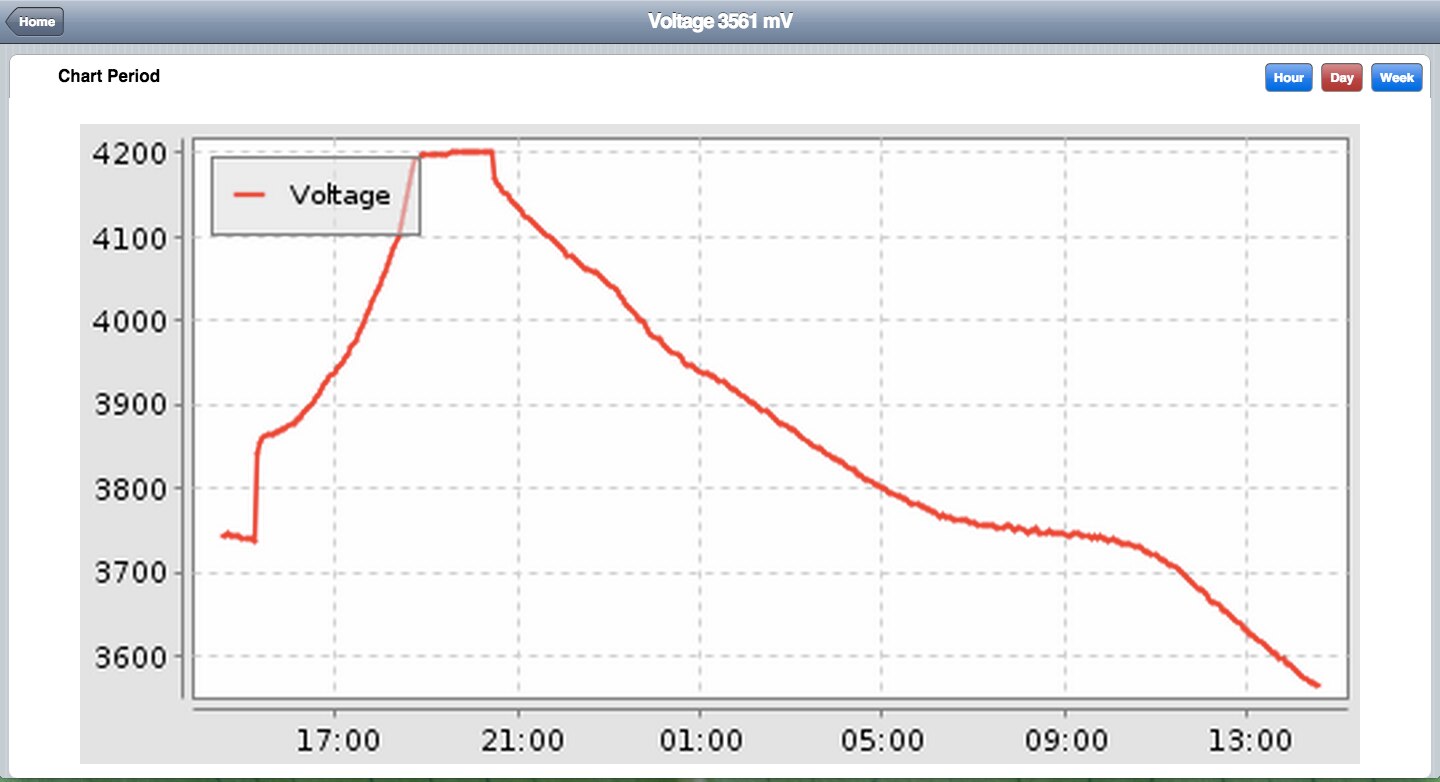
Graphs: graphs are available for every measured value in hourly, daily or weekly view |
Enclosure: enclosure in the making |
Enclosure: screen fits, but enclosure needs additional layers to contain all electronics |
Testing: testing the control of a fan using the MSP430FR5969 and a 433MHz transmitter |
Enclosure: making additional layers to create depth in the enclosure |





Remote Sensor
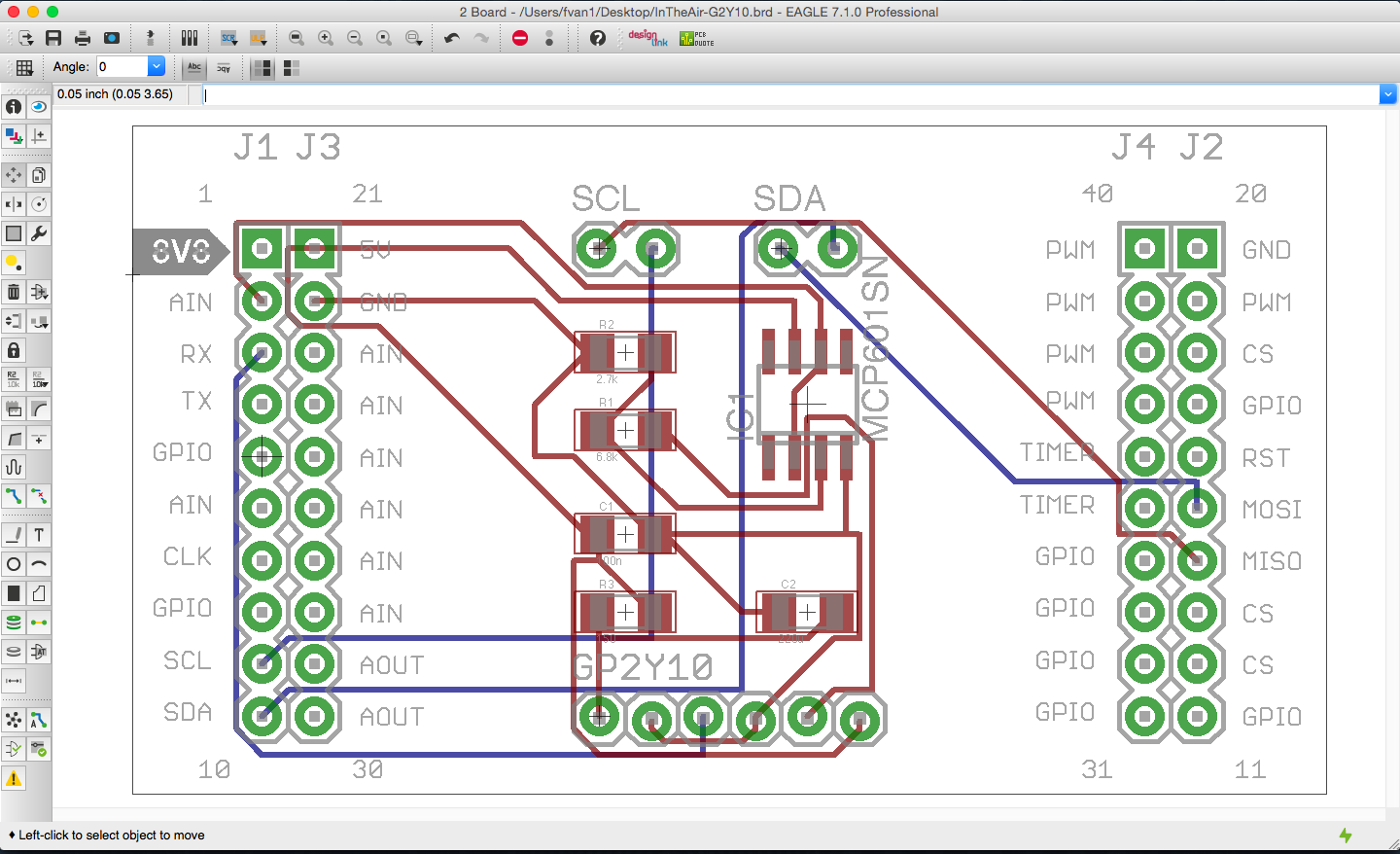
The remote sensor is built around the CC3200 Launchpad. Combined with a Fuel Tank and a custom dust sensor Boosterpack (week 13), it offers dust level monitoring, temperature measurements, battery information and solar charging. The CC3200 uses MQTT (week 4) to pass all the monitoring data to the control unit.
| {gallery:autoplay=false} Remote Sensor |
|---|
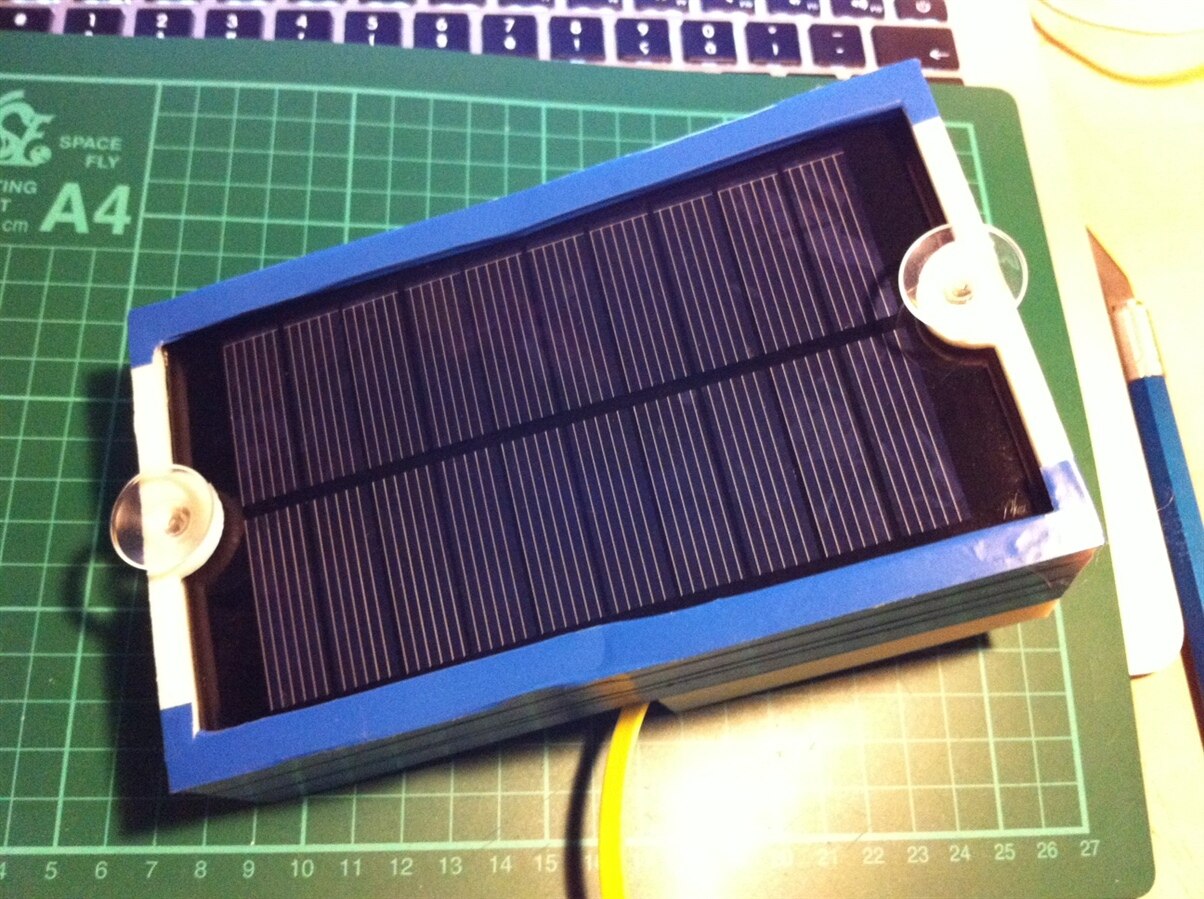
Remote sensor: Attached to window for solar charging |
|
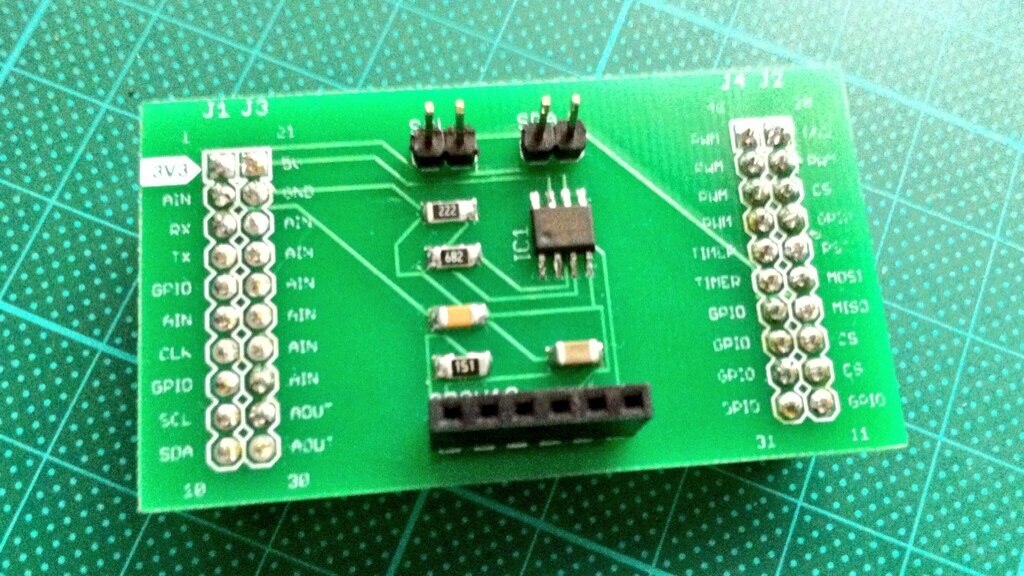
Soldering: my adventures soldering surface mount components for the first time |
Boosterpack: board design |
Boosterpack: fully populated dust sensor boosterpack |
Remote sensor: my printer giving me trouble days before the end of the challenge |
Remote sensor: solar panel and window suckers in place |
Remote sensor: the "guts" of the sensor, with a separate chamber for the dust sensor |



Thank You
Finally, I'd like to thank element14 and the sponsors (Texas Instruments, Würth Elektronik, Cisco, the Eclipse Foundation, Sierra Wireless and Keysight Technologies) for the opportunity to participate in this challenge, Christian for taking care of the orders and the logistical nightmares involved, Simon Leuz for his help with kits and questions and my fellow competitors and e14 members for their valuable feedback and help over the course of this challenge. Thank you!

Top Comments
-

clem57
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

clem57
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children