



This blog describes assembly and testing of the TE Connectivity magnetic angle sensor. The circuit design was described in a previous blog. The PCB arrived a couple of weeks ago, but I had to wait for parts to build it.
I had ordered parts from Newark using a shopping cart I won in a Project14 contest. They came in this week accompanied by an $18 shipping charge but I am now able to assemble these cards. Here is what it looks like.
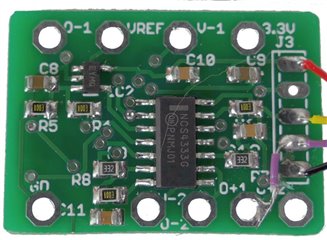

Note the sensor chip is on the underside of the card to allow it to be near the magnet without interference from other components. The extra long pads I used for the magnetic sensor proved very useful in making the small chip hand solderable. I used a little flux and wicked the solder under the chip. It is a relief that the magnetic sensor was solderable on the first try and I didn't damage it, because I have no spares.
To test the circuit I mounted a neodymium bar magnet on a shaft that allowed the magnet to be rotated in front of the sensor by a gearmotor.
Here is a quick video showing the sensor in action:
This is the second analog sensor that is now assembled and working properly.
There are still 2 more PCBs on order, one controls the 8 pumps and the other one connects the 2 LCD displays. I am a bit worried that they got delayed due to the Chinese New Year holiday, but I can work on the mechanical design while waiting for them. Maybe even some software.
Update:
I mounted the magnet on the steering column with a 3D printed bracket and ran a quick test of the magnetic angle sensor:
This motor adds some noise that I may need to filter out. I had actually backed off on the low-pass filter to get faster response, so it shouldn't be a problem to improve it. I could always do it in software if needed. I also need to test if the other motor adds noise.
Relevant Links
Sixth Sense Design Challenge: About This Challenge
Sixth Sense Design Challenge: Technical Documents
GraffitiBot Project Blogs
Sixth Sense GraffitiBot - blog 1
Sixth Sense - Kit Unboxing and Other Parts - GraffitiBot blog 2
Sixth Sense - Sensor Circuits - GraffitiBot blog 3
Sixth Sense - Interfaces - GraffitiBot blog 4
Sixth Sense GraffitiBot - System Interconnect - blog 5
Sixth Sense GraffitiBot - Wheels & Motors - blog 6
Sixth Sense GraffitiBot - ST Sensor Tile App - blog 7
Sixth Sense - Load Cell PCB - GraffitiBot blog 8
Sixth Sense - Magnetic Angle Sensor - GraffitiBot - Blog 9
Sixth Sense - LCD Interface - GraffitiBot - blog 10
Sixth Sense - Pump Controller - GraffitiBot Blog 11
Sixth Sense Main Drive Motor - GraffitiBot - blog 12
Sixth Sense Motor Controller Mods - GraffitiBot blog 13
Sixth Sense - RTD - GraffitiBot Blog 14
Sixth Sense Mechanical Design - GraffitiBot Blog 15
Sixth Sense GraffitiBot Motor Wiring - Blog 16
Sixthe Sense GarffitiBot - First Dry Run - Blog17
Sixth Sense GraffitiBot Hydraulics - Blog 18
Top Comments