



In this post I will introduce the Emubot project. Emubot is a simplified Logo turtle developed on the AMD-Xilinx Spartan-7 FPGA of the Digilent Arty S7 board. This simplified Logo turtle protoype with a Pmod OLED display module is aimed at children and adults, with it they can learn different skills while having fun.
Emubot can be programmed to go forward and turn left and right by pressing the corresponding buttons. Emubot like emus cannot fly or walk backwards, only forwards.
Emubot uses the Bot Application Framework that I have prepared for the Digilent Arty S7 based bot.
This post is part 8 of my contribution to the "7 Ways to Leave Your Spartan-6" program, learning about the Xilinx Spartan-7 FPGA on the Digilent Arty S7 50 board.
About Emubot
Emubot is a simple floor robot with motion sequence programming. Unlike other programmable sequence robots on the market, Emubot cannot move backwards. This fact makes the user have to make more effort to mentally program and visualize the robot trajectories. Children can gain sequencing, estimation, and problem solving while having fun.

A 360º view of the Emubot
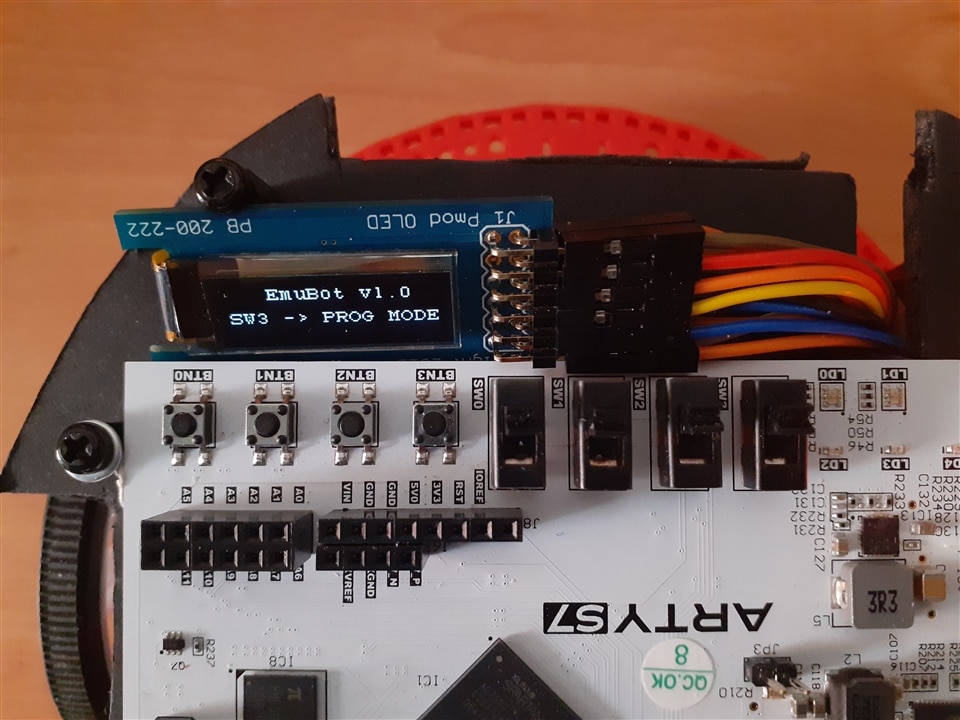
Unlike the ArtyBot models featured in previous blogs, this time we moved the PmodOLED display to the front of the bot.
It is placed behind the four push buttons on the Arty S7 board to facilitate the programming of the movement sequence with the robot looking in its forward direction.
Another floor has been added to the chassis to make it easier to press the buttons horizontally.
Bill of materials
If you want to replicate this project you will need:
| Product Name | Manufacturer | Datasheet |
| Arty S7 50 | Digilent | Buy Now |
| TI-RSLK | element14 | Buy Now |
| PmodOLED | Digilent | Buy Now |
Programming the Emubot
Programming the sequence of movements in the Emubot is very simple. The OLED display informs of the functions of each button or switch.
- After initial powering, LEDs are tested and the sequence memory is cleared.
- Toggle PROGRAM/RUN mode with toggle switch SW3.
- In PROGRAM mode the user can press a sequence of commands, which are stored in the sequence memory.
- A maximum of 48 commands can be stored; each command being either one forward movement or a left/right turn.
- User can delete commands with the DELETE button, BTN3 in PROGRAM MODE.
- Each forward command causes the unit to move approx. 20 cm forward.
- Each turn command causes the unit to rotate 90º.
- When the user finish programming the sequence the user can change to RUN mode changing SW3 from PROGRAM to RUN mode.
- The sequence will not start until the user press the RUN button, BTN3 in RUN MODE.
- In all the modes the OLED display shows the function for each button.
- When the RUN button is pressed, the Emubot will execute all the commands stored in order.
- Showing the next movement command on the display and with a LED indication signal.
- When the command sequence completes, the Emubot will stop.
- Ready for a new movement sequence.
| {gallery}Emubot menus |
|---|
|
HOME MENU. PRESS SW3 FOR PROGRAMMING THE BOT |
|
SEQUENCE EDITOR. INSERT FORWARD, TURN LEFT & TURN RIGHT COMMANDS. |
|
SEQUENCE EDITOR WITH BLINKING CURSOR. |
|
BUTTON FOR DELETING SEQUENCE COMMANDS |
|
SWITCH TO RUN MODE AND RUN |
|
EMUBOT LOGO BY "REIDAK" |





The user can program complex sequences of up to 48 different motion commands.
The application program
The application can be downloaded from the github repository under E14SpartanMigrationProgram/bot/src/emubot_app.c
GitHub - javagoza/E14SpartanMigrationProgram
It's a very simple application that makes extensive use of the Bot Application Framework introduced in the previous blog.

Go to the github repository for the most up-to-date copy of the code
/************************************************************************/
/* */
/* emubot.c -- emubot application */
/* This file is part of the Arty S7 Bot Library */
/* */
/************************************************************************/
/* Author: Enrique Albertos */
/************************************************************************/
/*
This library is free software; you can redistribute it and/or
modify it under the terms of the GNU Lesser General Public
License as published by the Free Software Foundation; either
version 2.1 of the License, or (at your option) any later version.
This library is distributed in the hope that it will be useful,
but WITHOUT ANY WARRANTY; without even the implied warranty of
MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU
Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public
License along with this library; if not, write to the Free Software
Foundation, Inc., 51 Franklin St, Fifth Floor, Boston, MA 02110-1301 USA
*/
/************************************************************************/
/* Module Description: */
/* */
/* This file contains the emubot application */
/* After initial powering, the sequence memory is cleared. */
/* Toggle PROGRAM/RUN mode with toggle switch SW3. */
/* In PROGRAM mode the user can press a sequence of commands, */
/* which are stored in the sequence memory. */
/* A maximum of 48 commands can be stored; each command being either */
/* one forward movement or a left/right turn. */
/* User can delete commands with the DELETE button, */
/* BTN3 in PROGRAM MODE. */
/* Each forward command causes the unit to move approx. 20cm forward. */
/* Each turn command causes the unit to rotate 90 degres. */
/* When the user finish programming the sequence the user can change */
/* to RUN mode changing SW3 from PROG to RUN. */
/* The sequence will not start until the user press the RUN button, */
/* BTN3 in RUN MODE. */
/* In all the modes the OLED display shows the function for each button.*/
/* When the RUN button is pressed, the Emubot will execute all the */
/* commands stored in order. */
/* When the command sequence completes, the Emubot will stop. */
/* */
/************************************************************************/
/* Revision History: */
/* */
/* 2022/07/10: (EAC) created */
/* */
/************************************************************************/
#include "emubot_app.h"
#include "sleep.h"
#define MAX_ACTIONS 16 * 3
static char bot_actions[MAX_ACTIONS];
/* Array containing a user defined font table. There can be up
** to 32 user defined characters. This table only defines 24
** of them.
** Each 8-byte row below defines one character glyph.
*/
uint8_t userFont[cbOledFontUser] = {
0x00, 0x04, 0x06, 0x7F, 0x7F, 0x06, 0x04, 0x00, // Char 000 (.)
0x00, 0x10, 0x30, 0x7F, 0x7F, 0x30, 0x10, 0x00, // Char 001 (.)
0x08, 0x08, 0x08, 0x2A, 0x3E, 0x1C, 0x08, 0x00, // Char 002 (.)
0x08, 0x1C, 0x3E, 0x2A, 0x08, 0x08, 0x08, 0x00, // Char 003 (.)
};
#define CHAR_FORWARD 0
#define CHAR_LEFT 3
#define CHAR_RIGHT 2
void emu_bot_application() {
int actions_number = 0;
BotDrivers botDrivers;
xil_printf("EMU BOT application Started\n\r");
BOT_init(&botDrivers);
for (int ch = 0; ch < 0x04; ch++) {
OLED_DefUserChar(&botDrivers.oled, ch, &userFont[ch * cbOledChar]);
}
OLED_SetCharUpdate(&botDrivers.oled, 0);
OLED_ClearBuffer(&botDrivers.oled);
OLED_SetCursor(&botDrivers.oled, 0, 0);
while (1) {
if (SWITCHES_DRIVER_poll_switch4(&botDrivers.switchesDriver)) {
OLED_SetCharUpdate(&botDrivers.oled, 1);
OLED_Clear(&botDrivers.oled);
OLED_SetCursor(&botDrivers.oled, 0, 3);
OLED_PutString(&botDrivers.oled, "LFT FWD RGT DEL");
OLED_SetCursor(&botDrivers.oled, 0, 0);
while (SWITCHES_DRIVER_poll_switch4(&botDrivers.switchesDriver)
&& actions_number < MAX_ACTIONS) {
if (BUTTONS_DRIVER_button1_pressed(&botDrivers.buttonsDriver)) {
bot_actions[actions_number++] = 'L';
OLED_PutChar(&botDrivers.oled, CHAR_LEFT);
}
if (BUTTONS_DRIVER_button2_pressed(&botDrivers.buttonsDriver)) {
bot_actions[actions_number++] = 'F';
OLED_PutChar(&botDrivers.oled, CHAR_FORWARD);
}
if (BUTTONS_DRIVER_button3_pressed(&botDrivers.buttonsDriver)) {
bot_actions[actions_number++] = 'R';
OLED_PutChar(&botDrivers.oled, CHAR_RIGHT);
}
if (BUTTONS_DRIVER_button4_pressed(&botDrivers.buttonsDriver)) {
if (actions_number > 0) {
actions_number--;
OLED_PutChar(&botDrivers.oled, ' ');
OLED_RecedeCursor(&botDrivers.oled);
OLED_RecedeCursor(&botDrivers.oled);
OLED_PutChar(&botDrivers.oled, ' ');
OLED_RecedeCursor(&botDrivers.oled);
}
}
OLED_PutChar(&botDrivers.oled, '_');
OLED_RecedeCursor(&botDrivers.oled);
usleep(100000);
OLED_PutChar(&botDrivers.oled, ' ');
OLED_RecedeCursor(&botDrivers.oled);
usleep(100000);
}
}
if (actions_number > 0) {
OLED_SetCursor(&botDrivers.oled, 0, 3);
OLED_PutString(&botDrivers.oled, "STOP RUN");
OLED_SetCursor(&botDrivers.oled, 0, 0);
while (!((BUTTONS_DRIVER_poll(&botDrivers.buttonsDriver) & 0b1001)
> 0)) {
usleep(1000);
}
OLED_SetCursor(&botDrivers.oled, 0, 3);
OLED_PutString(&botDrivers.oled, "STOP ");
OLED_SetCursor(&botDrivers.oled, 0, 0);
OLED_SetCursor(&botDrivers.oled, 0, 0);
OLED_PutString(&botDrivers.oled, " ");
OLED_PutString(&botDrivers.oled, " ");
OLED_PutString(&botDrivers.oled, " ");
OLED_SetCursor(&botDrivers.oled, 0, 0);
sleep(1);
for (int i = 0; i < actions_number; ++i) {
if (BUTTONS_DRIVER_button1_pressed(&botDrivers.buttonsDriver)) {
actions_number = 0;
OLED_Clear(&botDrivers.oled);
OLED_SetCursor(&botDrivers.oled, 0, 3);
OLED_PutString(&botDrivers.oled, " CANCEL");
sleep(1);
break;
}
if (bot_actions[i] == 'L') {
LEDS_DRIVER_set_led1_on(&botDrivers.ledsDriver);
OLED_PutChar(&botDrivers.oled, CHAR_LEFT);
//usleep(50000);
DRIVING_DRIVER_turn_left_degrees(&botDrivers.drivingDriver,
90);
LEDS_DRIVER_set_led1_off(&botDrivers.ledsDriver);
}
if (bot_actions[i] == 'R') {
LEDS_DRIVER_set_led3_on(&botDrivers.ledsDriver);
OLED_PutChar(&botDrivers.oled, CHAR_RIGHT);
//usleep(50000);
DRIVING_DRIVER_turn_right_degrees(&botDrivers.drivingDriver,
90);
LEDS_DRIVER_set_led3_off(&botDrivers.ledsDriver);
}
if (bot_actions[i] == 'F') {
LEDS_DRIVER_set_led2_on(&botDrivers.ledsDriver);
OLED_PutChar(&botDrivers.oled, CHAR_FORWARD);
//usleep(50000);
DRIVING_DRIVER_drive_forward_cm(&botDrivers.drivingDriver,
20);
LEDS_DRIVER_set_led2_off(&botDrivers.ledsDriver);
}
}
}
OLED_SetCharUpdate(&botDrivers.oled, 0);
OLED_ClearBuffer(&botDrivers.oled);
OLED_SetCursor(&botDrivers.oled, 0, 0);
OLED_PutString(&botDrivers.oled, " EmuBot v1.0");
OLED_SetCursor(&botDrivers.oled, 0, 2);
OLED_PutString(&botDrivers.oled, "SW3 -> PROG MODE");
OLED_Update(&botDrivers.oled);
actions_number = 0;
BUTTONS_DRIVER_reset(&botDrivers.buttonsDriver);
}
}
FPGA block design
Refer to previous blogs for more information about this design and how to store the bitstream to program the FPGA inside non-volatile flash memory.

Credits
Emubot logo by "Reidak", the new engineer girl in the family. Her drawing was the winner of the family competition.
Here are the first and second place winners:


-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children