


Here is a list of the posts in this challenge
Gr0G - 03 - High-pressure system design
Gr0G - 07 - Playing with the Gertbot
Gr0G - 11 - Building the box (2)
Gr0G - 12 - Building the high-pressure system
Gr0G - 13 - Building the high-pressure system (2)
Source code available at https://github.com/ambrogio-galbusera/gr0g, https://github.com/ambrogio-galbusera/gr0g-ble-android and https://github.com/ambrogio-galbusera/gr0g-ble
Let's now start to build the control board. This is the electrical circuit we are going to build (it's a bit difficult to read, but the original Fritzing file is attached)
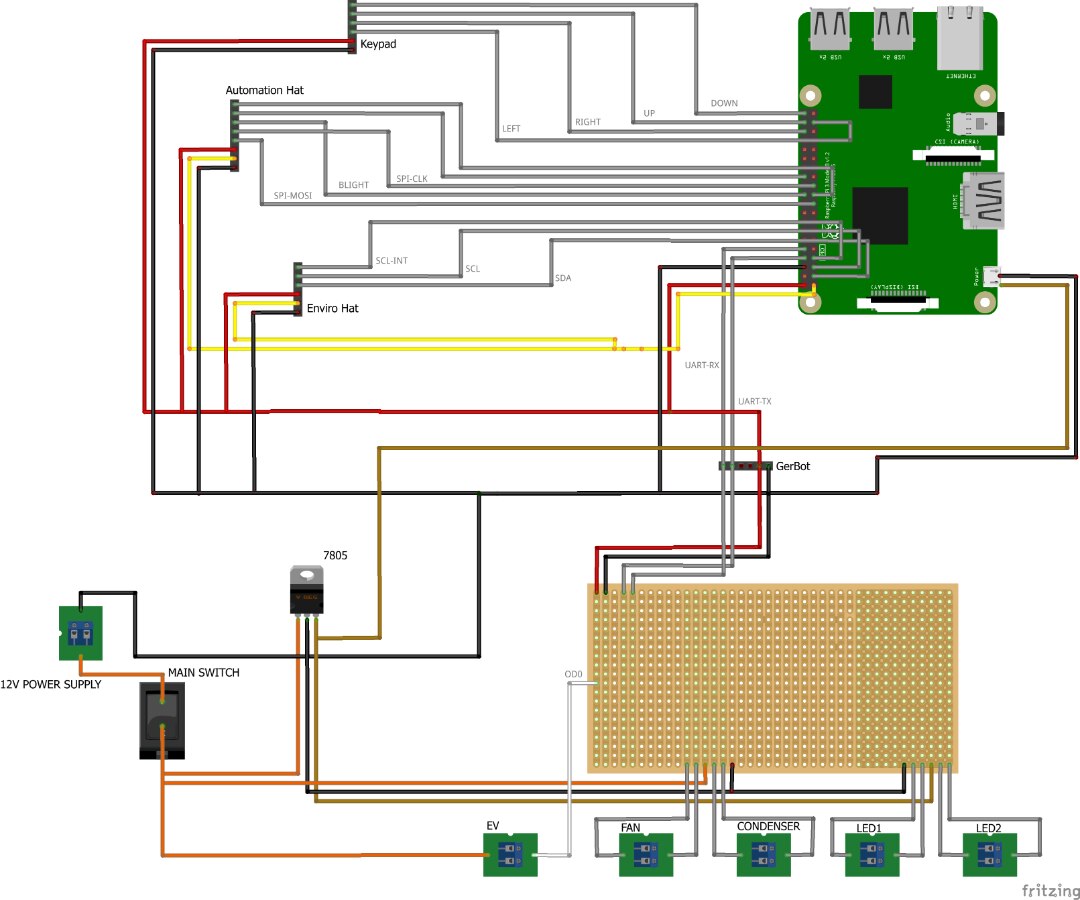
Some notes about this diagram
- The control board takes a 12V dc power supply. It converts the 12V dc to 5V dc through a 7805. Since the output of a 7805 is not very "clean" (it has ripple and spikes that may cause damages to the Raspberry Pi and the other boards), I choose to connect the 7805 output to the USB connector of the Raspberry Pi. The USB connector has a Zener to eliminate spikes and some circuitry to level the ripple. Then the 5V and 3.3V to power up external boards is taken from the 40-pin header connector
- Raspberry Pi absorbs a lot of current (up to 2A), so the 7805 is going to get very hot
- The Keypad connector uses four GPIOs to read the status of keys to allow the user to navigate through the screens shown on the display of the PiMoroni Automation Hat. I could have connected the keypad to the PiMoroni Automation Hat inputs, but
- PiMoroni Automation Hat has just three inputs (I need four inputs)
- The library provided to control the PiMoroni Automation Hat tries to access the I2C bus as soon as you initialize the library itself, but I am going to use the sensors on the Enviro Hat
- The PiMoroni Automation Hat inputs are connected directly to the Raspberry Pi GPIO pins
For all these reasons, it's not so bad to connect keypad directly to the Raspberry Pi
- The Automation Hat connector takes the SPI signals plus a GPIO (to control display backlight) and power supply (both 3.3V and 5V). The SPI bus is required to control the PiMoroni Automation Hat display. This display will be mounted on one of the vertical panels of the Gr0G box to show astronauts information about the status of the box
- The Enviro Hat connector takes the I2C signals and power supply (both 3.3V and 5V). The I2C is required to access hat's sensors. The hat will be mounted on a bracket. The display on the EnviroHat will not be used
- The Gertbot board requires an UART to be commanded and controlled. The power section will be connected to the 12V dc (for fan, condenser, and solenoid valve) and 5V (for LEDs)
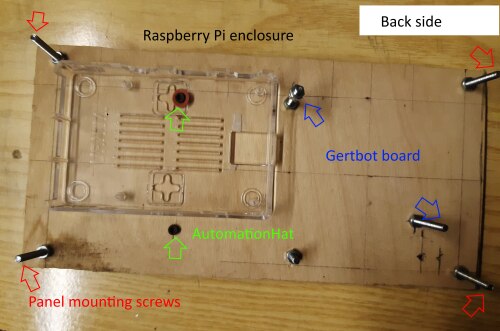
The Raspberry Pi, the Gertbot board, the PiMoroni Automation Hat will be mounted on a plywood board

The boards have been then put in place. First, the Raspberry Pi

Then, the PiMoroni Hacker board with the connectors for the external boards
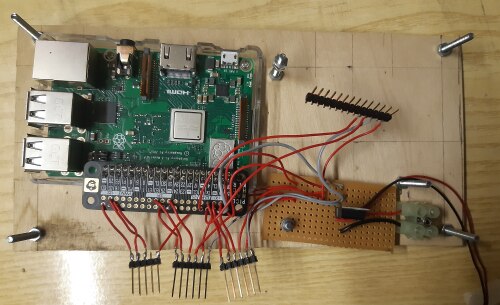
Finally, the Gertbot board

Then, the PiMoroni Automation Hat board has been installed on the front side of the plywood panel

UPDATE:
PWM output can not handle the current required by both the dehumidifier (fans + Peltier cell) and cooler. So I disconnected the Peltier cell from the PWM output pins and now I am going to switch on and off the cell itself by means of opendrain output 1. Since opendrain output are rated for 5A maximum (and the Peltier cell draws 6A) I used the opendrain output to drive a relay, and the relay NO pin will then be connected to the Peltier cell. The new diagram in shown in picture

Top Comments
-

skruglewicz
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

amgalbu
in reply to skruglewicz
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

balearicdynamics
in reply to amgalbu
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

skruglewicz
in reply to balearicdynamics
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

balearicdynamics
in reply to amgalbu
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

balearicdynamics
in reply to amgalbu
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children