



Another eventful week - most of it spent in Washington, has made the rest of the week ultra busy. The challenge deadline is looming and the mechanical design really needs to get done so I can start wiring everything up. The design of the front end and the chassis turned out to be quite complex, partly because there are limits to what a 3D printer can do and I always try to print without any support structure.
Here is a video of the CAD models:
Unfortunately my CAD software cannot animate the whole assembly, so I can only show how it goes together with real parts - see below:
Fortunately all the parts printed well and I didn't have to re-do any time-consuming printing tasks.
It remains to be seen how well the printed bearing (bushing) in the steering mechanism will perform under load. I had to leave enough play for it to rotate freely, which makes it quite a bit sloppier than a proper pillow block bearing. The rest of the parts are all nice and tight.
I was looking around for an alternate (local) supplier for the pillow block bearing and discovered to my surprise - Walmart has it in their on-line catalog, however it would still entail shipping from China.
Here is a video of the chassis being assembled:
It may look like the project is sailing along with no issues, but that is just because I don't have time to stop and document all the crazy shenanigans I get into even though they might make for some juicy copy.
The mechanics are mostly complete now - just a couple more brackets left to design to hold the electronics.
I will try to find time to design a cover for the fluid reservoir - to minimize splashing.
I also have one more electronics test to do on the keypad before tackling the full wiring job.
And then it will be a race to see if I can get enough software working for a full system demo.
Trying to Iron out the software for a fully autonomous robot in one or two days is not normally a formula for success, but that is where we are.
With only one week left in the challenge, success is possible but is going to depend on having no unexpected tasks crop up, no family or work emergencies and immaculate performance on the remaining tasks. I am in the middle of softball playoffs, and I still have hockey every week, so I can't devote all my spare time to electronics. I had another trip scheduled to Washington this week, but I think it will be cancelled. That would have made 6 trips during the course of this project - they definitely made an already hard project significantly harder, but it is fun to stretch the limits.
Update 1:
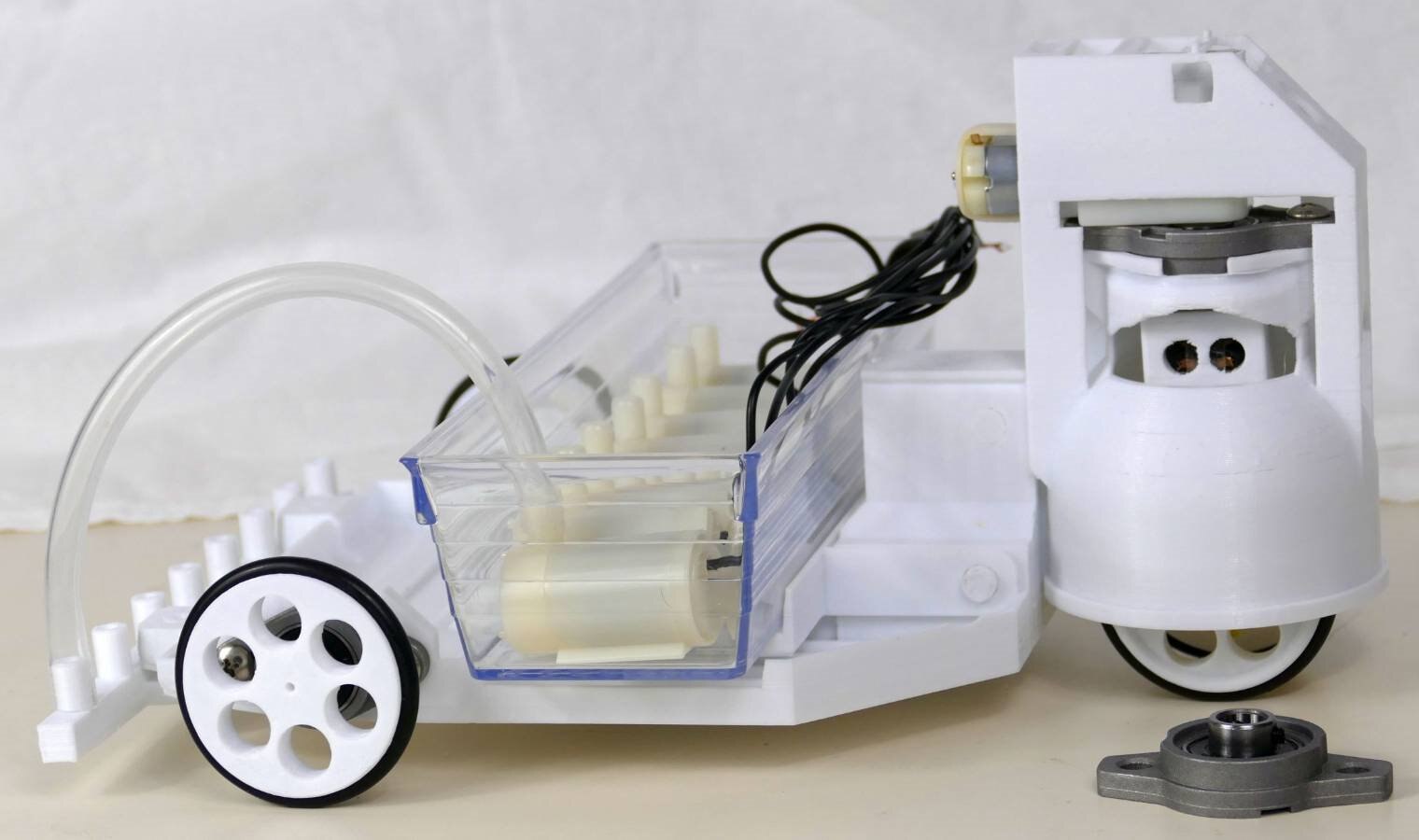
The steering pillow block bearing finally came in - of course it had to happen after I had designed a substitute 3D printed part and videoed the assembly, but it fits snugly and I am happy it arrived. This image shows it installed as well as a second bearing (upside down) beside the front wheels. I also connected one of the tubes to show how they will look.
I couldn't resist hooking the main drive motor up to a power supply just to make sure it could handle the load (I added weights to the reservoir to make it realistic). This is actually a nice milestone - the robot platform moved well under its own steam.
Update 2:
I won't always have time to produce a full blog for each step from here to the close of the challenge, but I will try to add updates as I go.
Basically I need to complete about a week's work in each day that remains.
In this update I designed and printed the mezzanine structure to hold the electronics. There are now about 28 printed plastic parts in the assembly.
I don't have enough time to enclose the electronics in a GT fairing, but at least they are mostly above the water level.
There is more that could be done to cover the reservoir and the electronics and improve the aesthetics, but the mechanics are complete enough to be fully operational.
The assembled platform is shown below:

Note the two batteries - one for the electronics and one for the motors.
I have also been dabbling a bit with the software but tomorrow I need to wire everything up so I can test software as it gets written.
It could be another late night as I have to play hockey as well.
I probably won't have enough time to dress the wiring neatly, so it could end up looking a bit like the proverbial spaghetti factory.
Relevant Links
Sixth Sense Design Challenge: About This Challenge
Sixth Sense Design Challenge: Technical Documents
GraffitiBot Project Blogs
Sixth Sense GraffitiBot - blog 1
Sixth Sense - Kit Unboxing and Other Parts - GraffitiBot blog 2
Sixth Sense - Sensor Circuits - GraffitiBot blog 3
Sixth Sense - Interfaces - GraffitiBot blog 4
Sixth Sense GraffitiBot - System Interconnect - blog 5
Sixth Sense GraffitiBot - Wheels & Motors - blog 6
Sixth Sense GraffitiBot - ST Sensor Tile App - blog 7
Sixth Sense - Load Cell PCB - GraffitiBot blog 8
Sixth Sense - Magnetic Angle Sensor - GraffitiBot - Blog 9
Sixth Sense - LCD Interface - GraffitiBot - blog 10
Sixth Sense - Pump Controller - GraffitiBot Blog 11
Sixth Sense Main Drive Motor - GraffitiBot - blog 12
Sixth Sense Motor Controller Mods - GraffitiBot blog 13
Sixth Sense - RTD - GraffitiBot Blog 14
Sixth Sense Mechanical Design - GraffitiBot Blog 15
Sixth Sense GraffitiBot Motor Wiring - Blog 16
Sixthe Sense GarffitiBot - First Dry Run - Blog17
Sixth Sense GraffitiBot Hydraulics - Blog 18
Top Comments