


On June 10th, 2020 at 11 AM CT // 4 PM GMT: Andrea Richetta, Head of the Pro /IoT Market will take us on an LPWAN Journey where LoRa Meets Arduino:
 |
| Buy NowBuy Now |
 |
| Buy NowBuy Now |
Download Tech Specs, Pinout, Eagle Files, and Schematics Below!
During this webinar, Andrea Richetta, head of the Pro/IoT market at Arduino will give an overview of the LPWAN world, focusing on LoRa and the available solutions from Arduino. You’ll learn how to create a complete end to end solution using Arduino hardware (boards, shields and a gateway) and the Arduino IoT Cloud. We will be giving away a pair of MKR WAN 1310 boards to 5 attendees who ask the best questions. The MKR WAN 1310, brings in a series of improvements when compared to its predecessor, the MKR WAN 1300. While still based on the Microchip SAMD21 low power processor, the Murata CMWX1ZZABZ LoRa module, and the MKR family’s characteristic crypto chip (the ECC508), the MKR WAN 1310 includes a new battery charger, a 2MByte SPI Flash, and improved control of the board’s power consumption. Additionally, Arduino will be offering Arduino branded swag such as T-shirts, hoodies, and possibly mugs!
SAMD21 low power processor, the Murata CMWX1ZZABZ LoRa module, and the MKR family’s characteristic crypto chip (the ECC508), the MKR WAN 1310 includes a new battery charger, a 2MByte SPI Flash, and improved control of the board’s power consumption. Additionally, Arduino will be offering Arduino branded swag such as T-shirts, hoodies, and possibly mugs!
There are several ways you can connect using this board: the Arduino IoT Cloud, your own LoRa network using the Arduino LoRa PRO Gateway, existing LoRaWAN infrastructure like The Things Network, or even other boards using the direct connectivity mode. In the past, most members have opted to use two boards, whether it was through the Smarter World competition or through the roadtest that we are currently doing:
infrastructure like The Things Network, or even other boards using the direct connectivity mode. In the past, most members have opted to use two boards, whether it was through the Smarter World competition or through the roadtest that we are currently doing:
The Arduino IoT Gateway, also featured during this presentation, is currently only available in the UK but you can use an alternate gateway or connect using another MKR 1310 board.
The new battery charger, a 2MByte SPI Flash, and power consumption should be of interest to fans of the MKR 1300.
Improved Battery Power
The latest modifications have considerably improved the battery life on the MKR WAN 1310. When properly configured, the power consumption is now as low as 104uA! It is also possible to use the USB port to supply power (5V) to the board; run the board with or without batteries - the choice is yours.
On-board Storage
Data logging and other OTA (Over The Air) functions are now possible since the inclusion of the on board 2MByte Flash. This new exciting feature will let you transfer configuration files from the infrastructure onto the board, create your own scripting commands, or simply store data locally to send it whenever the connectivity is best. Whilst the MKR WAN 1310’s crypto chip adds further security by storing credentials & certificates in the embedded secure element. These features make it the perfect IoT node and building block for low-power wide-area IoT devices.
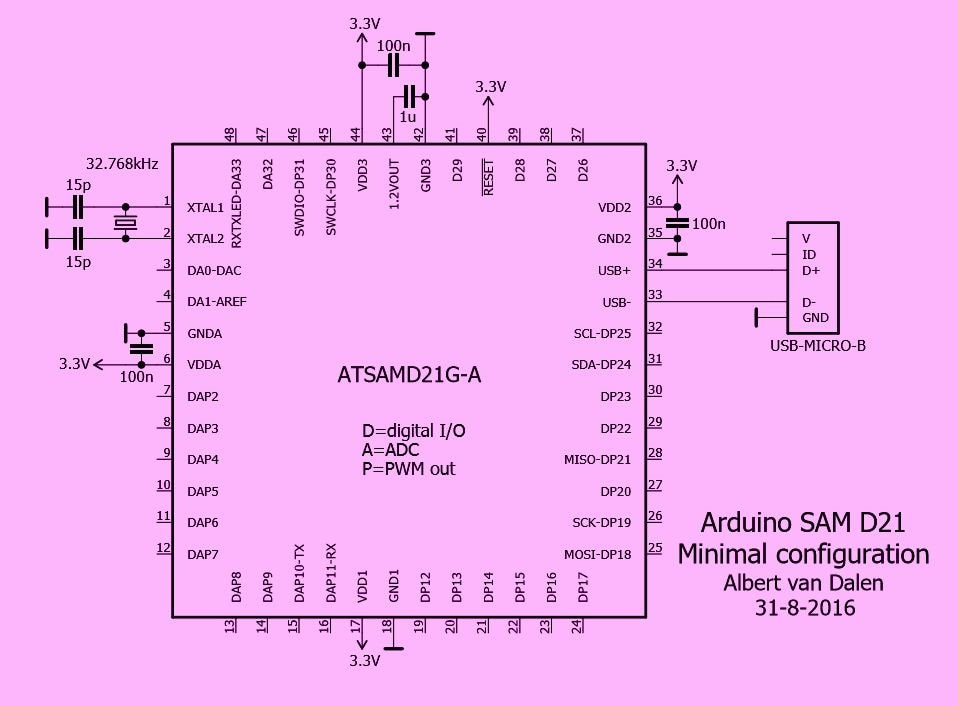
It features a Microchip AT SAMD21, 48 Mhz 32 bit MO+ ARM Cortex low power processor. Its the same SAMD21 as the MKR 1000, MKR Zero, and Arduino/Genuino Zero boards.
The Arduino MKR 1300 uses the same pin mapping as the MRK 1000:


Power Pins:
- Li-Po (3.7V) - You can power the board by connecting a Lithium polymer battery (shown to the right) with a nominal voltage of 3.7.
- Vin - The board can be powered by a regulated 5V supply with a maximum voltage of 6V for this Pin.
- 5V - When the board is powered by USB, you can use this pin get +5V to power other circuit
- Vcc - This pin uses the on board regulator IC to output a regulated 3.3V
- GND - Ground Pins
Reset Pin - Bring this line LOW to reset the microcontroller. Typically used to add a reset button to shields which block the one on the board.
Analog Pins (Pins A0-A06) - The 7 analog pins are used to emasure analog voltage in the range 0- 3.3V with a resolution of 10 bit.
DAC0 Pin - The DAC pin is just above the Analog Pins and is used provide an analog voltage based in the digital input with a resolution of 10bit.
Digital I/O Pins (Pins 0-14) - Below the analog pins on the left and just below the reset are digital pins that can be used as either input or output pins. Low is at 0V and high is at 3.3V.
Serial Rx, Tx Pins (Pins 13, 14) - Pins 13 and 14 are used to Receive (Rx) and Transmit (Tx) TTL serial data. These pins are connected to the corresponding pins of the FTDI USB-to-TTL serial chip.
External Interrupts (Pins 0,1, 4, 5,6, 7, 8, A1, A4) - These pins can be used to trigger an interrupt on a low value, a rising or falling edge, or a change in value. See attachInterrupt()function for details.
PWM Pins (Pins 0, 1, 2, 3, 4, 5, 6, 7, 8, 10, A3, A4) - These pins provide 8-bit PWM output with the analogWrite () function.
SPI (Pin 8 - MOSI, Pin 9 - SCK, Pin 10 - MISO) - These pins support SPI Communication
LED - There is a built-in LED connected to digital pin 13. When the pin is HIGH value, the LED is on, when the pin is LOW, it's off.
I2C Pins (Pin 11 is SDA and Pin 12 is SCL) - Pin 11 (SDA) and Pin 12(SCL) support I2C (TWI) communication using the Wire library (documentation on the Wiring website).
AREF Pin - Reference voltage for the analog inputs. Used with analogReference().
The low power, high performance ARM Cortex-MO+ is ideal for a wide range of home automation, consumer, metering, and industrial applications. Its the same SAMD21 as the MKR 1000, MKR Zero, and Arduino/Genuino Zero boards. A unique feature of the SAMD21 chip is SERCOM, a set of six configurable serial interfaces. These can be turned into either a UART, I2C master, I2C slave, SPI master, and SPI slave. Additionally it features a 32-bit Real-Time Clock and calendar, 20 PWM channels, one 14-channel 12-bit ADC, on 10-bit DAC.
| ATSAMD21G18A Overview | |
|---|---|
| Architecture | ARM Cortex-MO+ |
| Voltage Range | 1.62-3.63V |
| Bus Size | 32-Bit |
| Max CPU Speed | 48MHz |
| Internal Oscillator | 21khz, 23Khz ULP, 8Mhz |
| Program Memory Size | 256KB |
| SRAM | 32KB |
| EEPROM | 32KB (emulated from Flash) |
| GPIO | 38 |
| ADC Channels | 14 |
| ADC Resolution | 12-bit |
| Digital-to-Analog Converter (DAC) | Yes |
| USB Controller | Yes |
| Direct Memory Access (DMA) | 12 Channel |
| Peripheral Touch Controller | Yes |
| Inter-IC Sound 12S | Yes |
32 bits, 48 Mhz
The 32 bit architecture allows you to process your instructions faster at double the speed of an 8-bit AVR. While the AVR must process data in 8-bit, the 32-bit architecture allows the SAMD21G to process data in one large chunk.
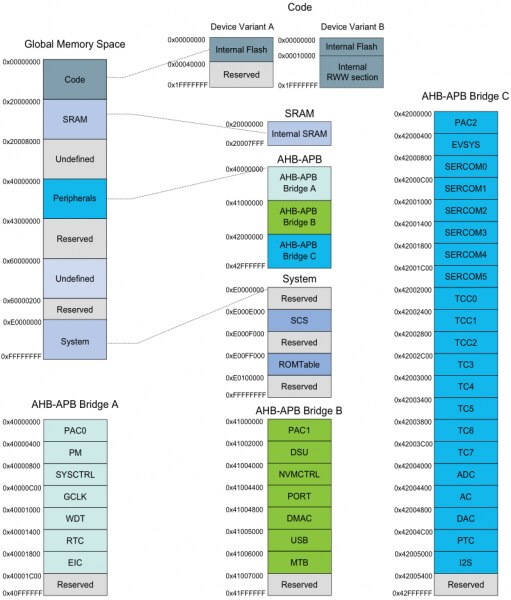
Memory Map:
USB Controller
Like the ATmega32U4 used on the Leonardo, ATSAMD21 comes with an integrated USB controller, allowing it to be used as either a USB device or host. In device mode it configures itself as a USB CDC (communication device class) so that your computer talks to it as if it were a serial port. This allows the SAMD21 to emulate a mouse, keyboard, or controller, and also work as a mass flash storage. If used as a USB host it can connect to keyboard or mouse, as well as, save data to a USB flash drive. However, to act as a host requires extra power supply.
Real-Time Clock
The SAMD21 has a separate real time clock (RTC), powered by an on board 32.78 crystal, that runs at a full 48 MHz. Also, almost every pin is tied to timer-counter, giving you a lot more PWM-capable I/O pins so you'll have plenty of options for dimming lights or controlling motors.
Reference links:
- MKRWAN LoRa WAN library reference: https://www.arduino.cc/en/Reference/MKRWAN
- Manage multiple non-blocking tasks: https://www.arduino.cc/en/Reference/Scheduler
- Sample an audio signal and get its frequency back: https://www.arduino.cc/en/Reference/AudioFrequencyMeter
- Real Time Clock to schedule events: https://www.arduino.cc/en/Reference/RTC
- To connect digital audio devices together: https://www.arduino.cc/en/Reference/I2S
Github links:
Enables network connection (local and Internet) with the Arduino MKR WiFi 1010, Arduino MKR VIDOR 4000 and Arduino UNO WiFi Rev.2: https://github.com/arduino-libraries/WiFiNINA
Source code and configuration files of the Arduino Core for Atmel's SAMD21 processor: https://github.com/arduino/ArduinoCore-samd
API to communicate with LoRa and LoRaWAN networks: https://github.com/arduino-libraries/MKRWAN
Arduino Command Line Interface: https://github.com/arduino/arduino-cli
Here is roundup of Smarter World projects that used the MKR WAN 1300 board:
Communal-based Access Control using an Arduino MKR 1300 WAN by BigG
- Smarter Access Control using Arduino MKR WAN 1300 boards
- Communal-based Access Control using Arduino MKR WAN 1300
The design approach was to split the project into two phases. Phase 1 Smarter Access Control using Arduino MKR WAN 1300 boards, was to develop and test a standalone system using just LoRa between the access panel and the central control panel. Phase 2 Communal-based Access Control using Arduino MKR WAN 1300 took the phase 1 design and expand the functionality by adding in the Internet gateway to allow for communal based access-control. It will also include some BLE functionality to allow for the possibility of configuration control and another user interface.
 |  |
LoRa GeLo MKR - Long Range Geo-Locator MKR 1300 by dougw :
The plan was to build the MKR 1300 into a platform with a set of useful interfaces that allow it to be adapted to many applications.
The core interfaces:
- a LoRa radio to enable low cost long range communications
- a GPS receiver (with UART interface) to track the location of the system and provide an accurate time
- a low-power SPI LCD to display graphics and text
- an I2C Grove interface to connect any serial Grove module
- 2 analog Grove interfaces to connect any analog Grove sensors
- a digital Grove interface to connect any digital grove module
These interfaces and connectors were implemented on a custom PCB that results in a clean compact system platform. Application systems were packaged in 3D printed cases tailored to accommodate the necessary features.The first application, which is the subject of this project, was a geo-locator system that can send GPS location data to a LoRa gateway.This system will initially be used to explore the reach of the LoRa radio.Some of the applications. Where you would use the geo-location capability include:
- If you generally don't have your cell phone turned on, this may be used to show where you are or where my car is.
- It could be used to show when you are arriving home.
- It can show how far away your ride is when you are being picked up after work.
- It could be used to tell you to turn your cell phone on and take it out of airplane mode.
The range of the radio will dictate which applications can be useful or how useful they will be.
Part of this initial project was to explore ways to maximize range of the radio.
 |  |
MKR WAN 1300: LoRa Marine Environmental Ranger
- Week 1: Making it Portable
- LoRa MER Week 2: Boat in a Box
- LoRa MER Week 3: Building a Shore Station and Starting the Boat
- LoRa MER Week 3.5: Testing Turbidity and Posting Data to Internet
- LoRa MER Week 4: Boat Afloat and New Antenna
- LoRa MER Week 5: Indoor Testing
- Week 6: First Sea Trials
- Week 7: Concept Demonstration
The LoRa Marine Environmental Ranger (LoRa MER) is a demonstration project using the Arduino MKR WAN 1300 to gather and assess environmental data in an aquatic environment.
With the advances in inexpensive microcontrollers, sensors, and low powered long range radio it is now possible to gather environmental data more easily and with less cost than ever before. Open water being less sparsely instrumented than much of the land mass provides an opportunity for new study. The near shore and inland waters are of particular interest in that they are susceptible to human activities and important to marine life. This project makes use of the long range, low power wireless capabilities of LoRa to study this environment.
The prototype described here is housed in a radio controlled boat. However, the platform can be modified to meet different requirements:
- Stationary Buoy - Moored buoy to continuously monitor a location
- Floating Buoy - Free moving platform to study currents or wind
- Autonomous or Semi-Autonomous Boat - Boat with programmed route or even decision making capability
- Radio Controlled Boat - Operator controlled boat
 |  |
 |  |
Elderly Person in the Community Care: Arduino MKR 1300 WAN by 14rhb
The idea was to build a small network that allowed a warden to monitor the well-being of several elderly persons who would be able to carry on living in their own accommodation whilst still being able to summon help if required. The basis for using the LoRa technology was that they would not need to subscribe to a broadband service and the system could operate just as well in rural areas.
Some parts of the world elderly relatives are cared for and their wisdom respected in the family. Unfortunately, perhaps due to social-economic reasons, there seems to be more news headlines about elderly persons in the UK struggling with a whole host of issues. The social changes in the UK over recent decades means that many older people are living alone and often do not get the friends or family visits that perhaps once was common place. The cost of care homes is sometimes prohibitive or just not agreeable in principle and so these older people stay in their homes. There is likely a period of time from being fully active in retirement to needing specialist or full-time care that they could benefit from some light-duty, low-cost care. This might include:
- Someone to call if they don't seem to be moving during long periods of the daytime?
- If their heart rate seems abnormal.
- Someone they can ask to call around for a minor issue
- Someone they can call out for a major issue, but perhaps not life threatening.
Technology could help in such instances and a simple and common Android App for messaging back to a local 'warden' control centre (WCC) would likely suffice to give some reassurance. Such a solution would rely on the use of a mobile which can be awkward in concept for some elderly people, perhaps with poor vision or dexterity issues. It would also need a paid 3G/4G service provider or home WiFi.
 |  |
 |  |
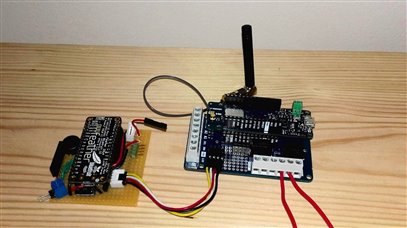
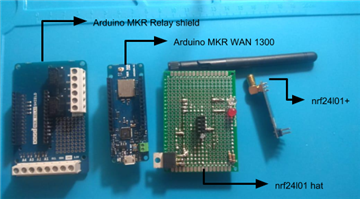
Arduino MKR WAN 1300: Detecting forestry fire using Lora Protocol by daniloo94
The main objective of this project is create a tool for help firemen and foresters detect and contain fires, before they spread over the forest. In Brazil, this type of event occur practically all year, but is aggravated when the air becomes drier. The number of incidents per year is about 68000, being largely caused by incorrect disposal of cigarettes on the highway. To develop this system, we need to consider that detecting fire outbreaks within a forest is not an easy task due to access barriers and totally unstable environment. o detect the environment changes, we created two types of Forest nodes, the first type of node has based in the presence of smoke on environment. In this node, the microcontroller is able to detect changes in air quality and send an alert message to the gateway when the smoke level reaches a critical value for the environment. The smoke detector node is basically composed of an Arduino Nano, which will be responsible for monitoring the environment during specific time intervals. In addition, it also consists of a NRF24l01, a low-cost radio capable of operating at 2.4 Ghz frequency. And finally, we use an MQ-2 sensor to detect the amount of smoke condensed in the air. e second type of node elaborated for this project, consists of the temperature node, this sensor node is able to detect variations in temperature and inform the gateway when a sudden change of temperature occurs in the environment. This node is composed of an Arduino Pro mini, which will be responsible for detecting the variation of temperature in the environment, a nrf24l01 +, for communication with gateway and neighbor nodes, and a BME280 sensor, a temperature sensor of high precision and low energy consumption . To route the sensor network data to final user, we need a microcontroller able of transmit this data for a long distance. In this case, the LoRa protocol will be ideal due to its long reach and low power consumption. With this, we will use the Arduino MKR WAN 1300 which has a long range chip. However we will need to establish communication with the network nodes to obtain the data. With this we will build one hat (Hardware at top) to facilitate the connection between Arduino and NRF24l01.
 |  |
 |  |
Arduino MKR WAN 1300 ---- Blog 1 Idea by snidhi:
snidhi 's idea was to give the LoRa capability to my old project The SolarBot (Simple Solar BOT ----Finale ) and read the sensor data via LoRa. Another option was to control the SolarBot via LoRa Connectivity and I want to check out if this works without a lag in real-time. Then one can control the SolarBot remotely via Lora and it can be used to send the BOT in hazardous conditions and measure data such as gas leaks, temperature, humidity.
 |  |
 |  |
Smart Little/Special Child Safety Watch by mahmood.hassan:
We all have little kids in our homes and every parent want to make sure that their kids are safe whenever they go outside of their homes. At the same time we also have little kids in our homes or around us how are special or little enough so they cant remember home address or their way back to home if they accidentally leave home and go little far away. And its very tough situations for parents if they cant find their little/special(mentally unstable etc) kids. Also if kids are in any sort of bad situation every parent want to help them but if they don't have any means to call for help or they don't have cell phone or unable to use it then there is no way to help/protect them.
To solve such issues long range of LORA module come into play. Design and built a smart watch using Arduino MKR 1300 equipped with GPS for the kids. And Other MKR module at home connected with display and alarm. Also internet connectivity is a plus point. Parent can set a Geo fence for the kids so whenever they go beyond that area it can alert the parents with there live Geo location. Also kids can alert their parent about any emergency/dangerous situation by simply pushing a button. Biggest advantage of using MKR module over GSM based is cost effectiveness and low power consumption. To built a Smart community we can also add multiple control modules at different public places and connect all these to one main server. In case of emergency MKR can connect to any of the available control module and alert their parent or law enforcement for timely action and to take preventive measures.
 |  |
This is a really great project that was done during the Remote Monitoring & Control competition in Project14:
LoRa Experimental Environmental Sensors (LoRaXes) by ralphjy:
LoRa Experimental Environmental Sensors (LoRaXes) - Introduction
LoRa Experimental Environmental Sensors (LoRaXes) - Initial RSSI Tests
LoRa Experimental Environmental Sensors (LoRaXes) - Need to use a bigger case
LoRa Experimental Environmental Sensors (LoRaXes) - Case Layout
LoRa Experimental Environmental Sensors (LoRaXes) - GPS is Working
LoRa Experimental Environmental Sensors (LoRaXes) - Temperature Sensor Working
LoRa Experimental Environmental Sensors (LoRaXes) - Case Assembly Part 1
LoRa Experimental Environmental Sensors (LoRaXes) - Assembly Complete
LoRa Experimental Environmental Sensors (LoRaXes) - Conclusion
ralphjy 's project LoRaXes is a loose reference to a Dr. Seuss character in a book about the plight of the environment during the industrial age. He began building a pair of outdoor LoRa sensors to use for GPS, temperature/humidity/pressure, ambient light, water level, and PIR. He started his project to find a use for a Things LoRa Gateway and two MKR WAN 1300 boards that he won as the Grand Prize in the IoT: In the Cloud challenge. This was his first experience with LoRa and the Things Network.
Goals achieved:
- Connect gateway to Things Network - there were only five LoRa gateways within a 50 km radius of my location that were connected to the Things Network, so he added access for sensors near him.
- Build two portable battery operated sensor units - he only fully completed assembly of one of the units, but he's tested the electronics for both.
- Connect both units to the Things Network - he has unique applications running for each MKR Wan 1300 on the Things Network console.
- Provide GPS functionality for one of the units - the fully assembled unit has the GPS module and he has used it with the mapping integration on the Things Network to display the unit's location.
- Measure RSSI in the proximity of his house - units have good operational margin on his property.
Goals Not Achieved:
- Determine the effective LoRa range of he gateway/sensor setup - he needed to find the time to get some data walking the GPS unit away from the gateway. hHe should be able to correlate the RSSI data associated with the GPS data packets and use -120 dBm as a range metric (or he could guess the real metric is when packets are not received - use the last location received). His accuracy may not be that good if he doesn't do some averaging. He's noticed that over time he could get geolocation outliers of 50-60 meters even though the clustering is more like 5-10 meters (with the unit in a static location).
- Measure/optimize battery life - He sort of gave up on this one when he realized that he has older MKR Wan 1300 boards that do not power down the Murata LoRa module in sleep mode (fmilburn pointed out this issue). The achievable sleep mode current is ~2 mA. He's seen implementations of full power shutdown using the TI TPL5110 ultra low power timer. He thinks he will give that a try. He can make room on the proto board to handle that. And he'll need to make sure that the GPS handles save and restore of the tracking data correctly. His guess is that even with the newer MKR Wan 1300 (released the end of 2018) he would still have had to power down the GPS since its power save mode draws ~11mA. He may need to look at other GPS units.
- Determine the reliability of his system by analyzing uptime - this is difficult to quantify in the prototype stage since he's been constantly power cycling the units. He noticed that his gateway reboots at least once daily. He probably needs to automate some processing on the Things Network console.
| LoRa Experimental Environmental Sensors (LoRaXes) | |
|---|---|
 |  |
 |  |
Here are some great LoRa projects from our RF (Radio Frequency) in Project14 :
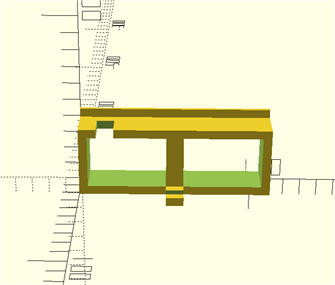
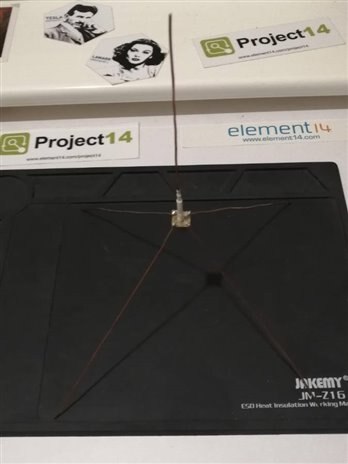
Building a poor man's quarter-wave 433MHz antenna: Introduction by gecoz
Building a poor man’s quarter-wave 433MHz antenna: Antenna’s construction
Building a poor man’s quarter-wave 433MHz antenna: Comparing Antennae
Building a poor man’s quarter-wave 433MHz antenna: Testing the antenna with ESP32 LoRa
| Building a poor man's quarter-wave 433MHz antenna | |
|---|---|
 |  |
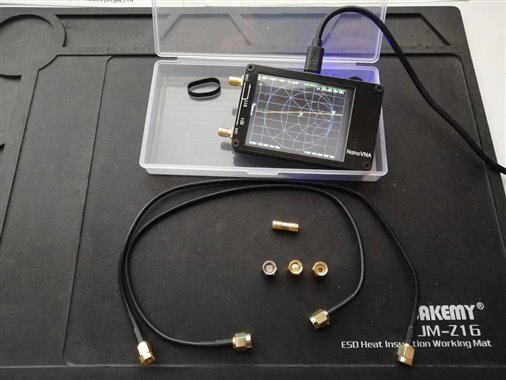 |  |
"Excellent experiments with a VNA, his project shows that anyone can start exploring antennas on a budget." - Community Member Judge
"This project blog taught me a great deal about RF measurements and also showed me the availability of some low-cost but effective test equipment. Fabio's series of blogs ofver the competition period were a real joy to see and read." - Community Member Judge
"Nicely documented and educational series using hobbyist accessible equipment" - Community Member Judge
Got mail! LoRaWAN Mail box sensor by eivholt
| Got mail! LoRaWAN Mail box sensor | |
|---|---|
 |  |
 |  |
Deck the halls with holiday flowers - and keep them alive by eivholt:
"I would like to give my gift to Deck the halls with holiday flowers - and keep them alive by eivholt." - deolee, First Place Holiday Special 19
| Deck the halls with holiday flowers - and keep them alive | |
|---|---|
 |  |
 |  |
"Deck the halls with holiday flowers - and keep them alive was a comprehensive, well documented and easy to follow project." - Community Member Judge
"Nice clean design, solving another practical problem!" - Community Member Judge
Lorra-Lorra-LoRa by paj
| Lorra-Lorra-LoRa | |
|---|---|
 |  |
| mkr-microchip_atecc508a_cryptoauthentication_device_summary_datasheet-20005927a.pdf | |
| MKRWAN1310V3.0_sch.pdf | |
| Pinout-MKRwan1310_latest.pdf | |
| ESLOV_connector.pdf | |



